
hector_exploration_controller publishs twist really slowly
Hello everyone,
I try to use `hector_exploration_node` and `hector_exploration_controller` to let robot explore the unknown environment in the stage_ros.
I simulate the environment by `stage_ros` and create the map by `gmapping` .
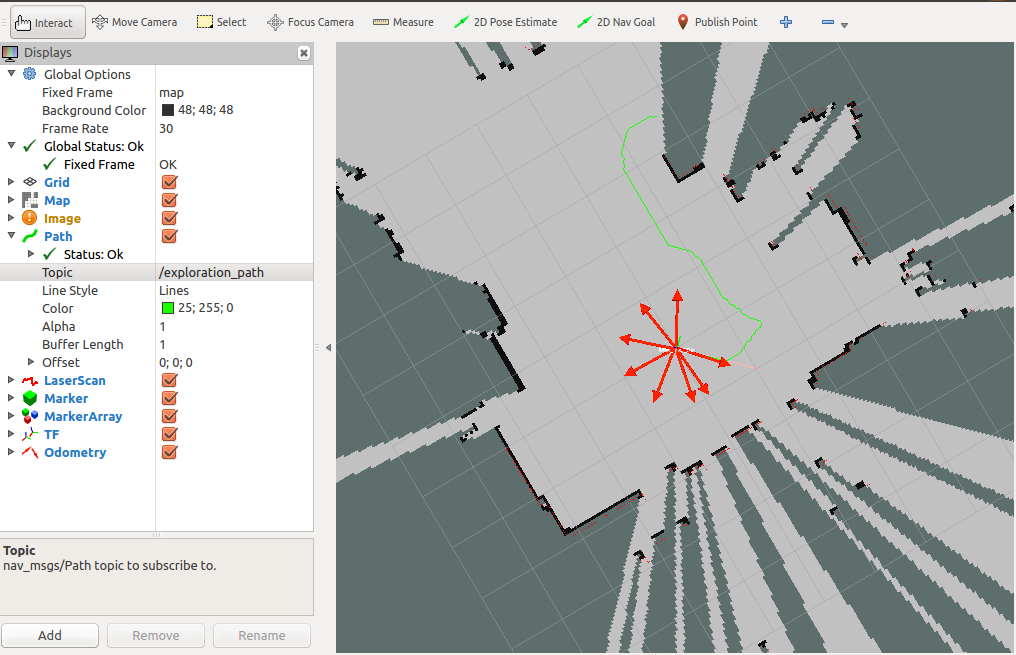
The problem is that I can get the topic `/exploration_path` published by `hector_exploration_node` , but no goals topic . And there is a trajectory from the robot to the unknown environment .
But the robot only rotate and cant move forward. And the it costs `hector_exploration_node` 20 more seconds every cycle.
I also find similar problems here.
Here is the rviz.
So , please give me some advice. Thanks first!
add a comment

