
Strange Visualization of Octomap
Hi there, I am running Octomapping with a Hokuyo Laser Scanner mounted on the front bumper of a Husky A200 but when I visualize the Octomap, I see some grid being strangely marked as unknown in the beginning but after cross the (0,0) the whole is working properly. In the screen cap below, you can see that from the very top of the map which is where the husky starts, some pixels were marked as unknown however they should be marked as known and free. then after passing the origin of the map point suddenly the Free spaces are stitched together and we see the whole white space being visualized correctly. Why are some pixels being marked strangely in the beginning ?
The Octomap Starts off like this :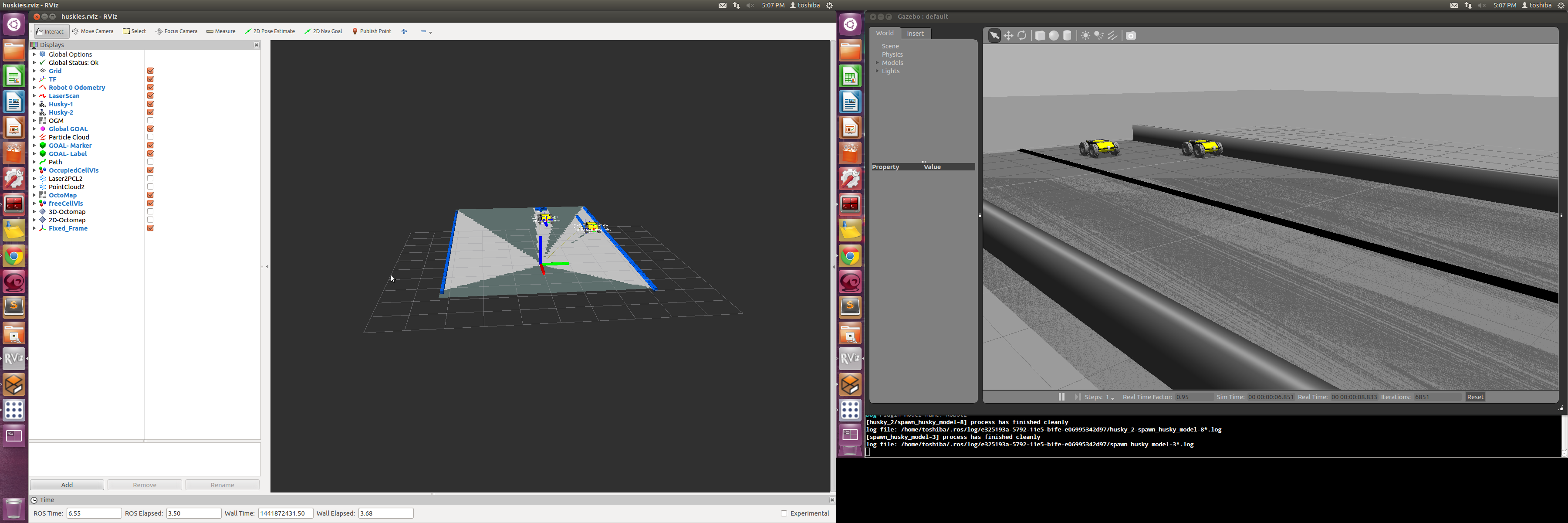
A little later it looks like this :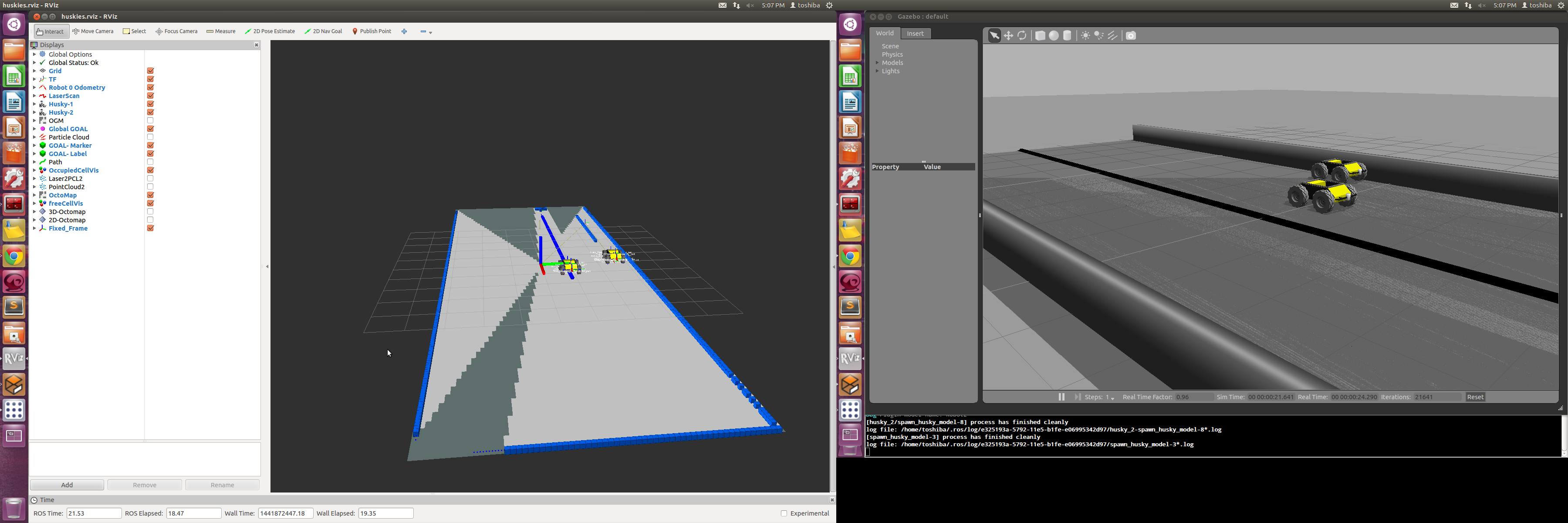
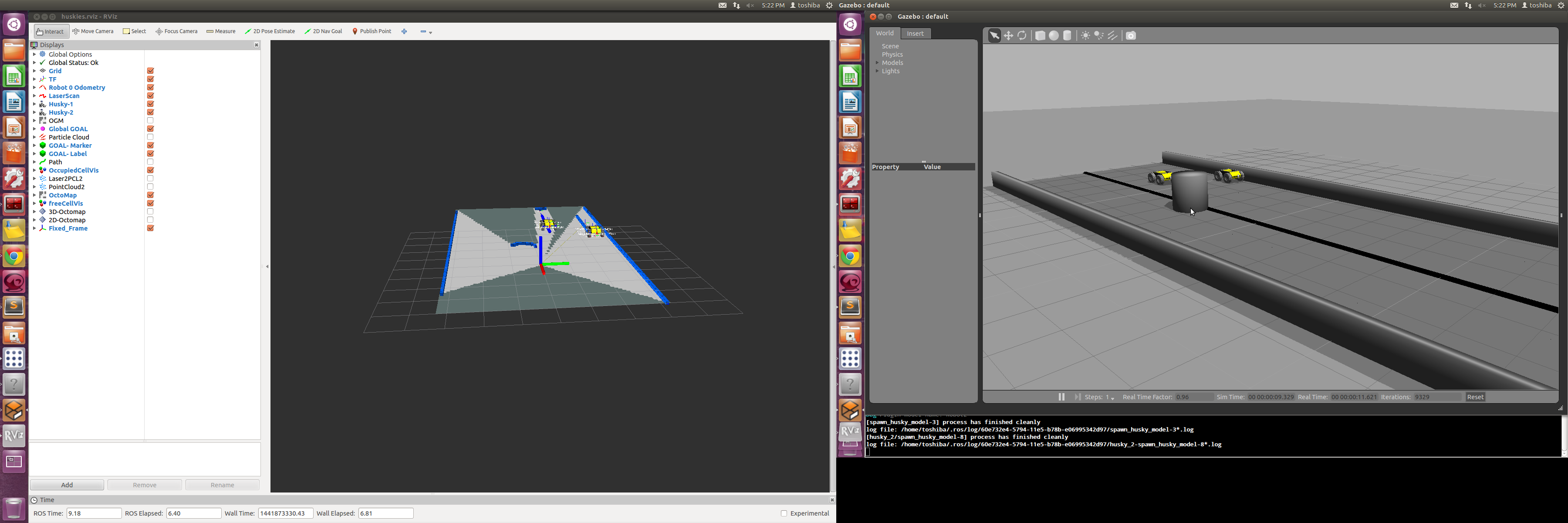
Also, all area behind the obstacles is still marked as FREE Space as shown here:
Finally it looks like this 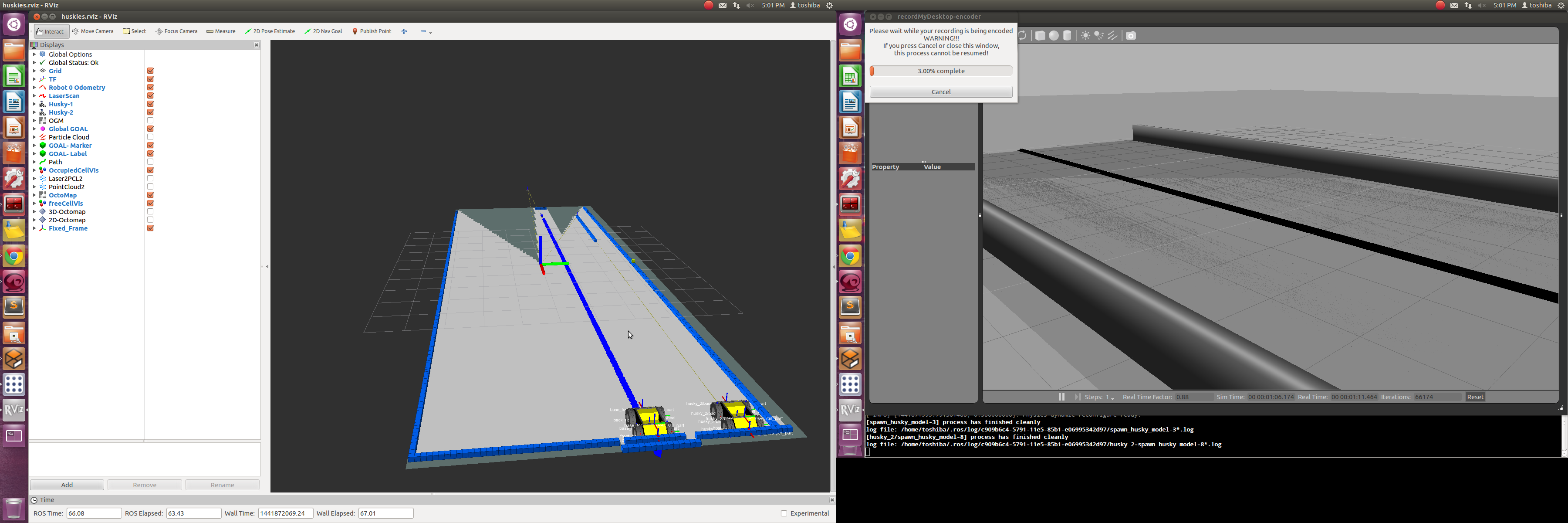
Why is there like a triangle of pixels to the left of Husky being marked at unknown in the beginning although between the robot and the wall there is nothing so the whole area should be marked as known?

