
specifying base_link frame for the Transformation tree

Hi all,
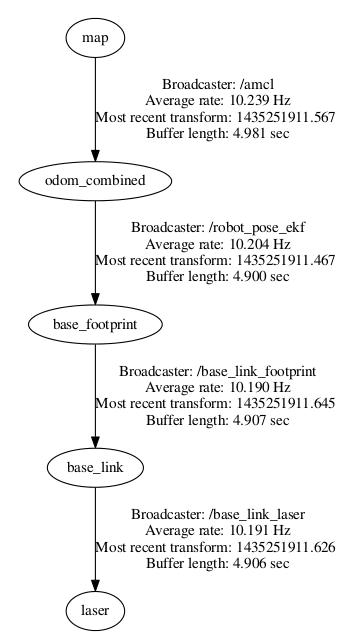
The base_link frame of my robot is 16 cm above the ground (or base_footprint frame) and laser frame is 8 cm above the base_link frame and I have specified all the transformations with respect to base_link frame. The origin is set to the map frame. Here is my TF tree:
Now my doubt is when I open RViz and see the robot_footprint with all the frames, base_link frame is on the ground and base_footprint is 16 cm below it, see the image:
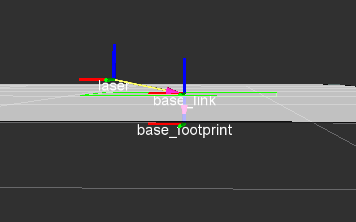
This causes laser to be 8 cm above the ground instead of 24 cm (16 cm + 8 cm) in RViz. Shouldn't the base_footprint be on the ground and base_link frame 16 cm above it? Can anyone tell me what is wrong here and how can I correct it so that the base_footprint is on the ground and base_link frame is 16 cm above it or am I misinterpreting something?
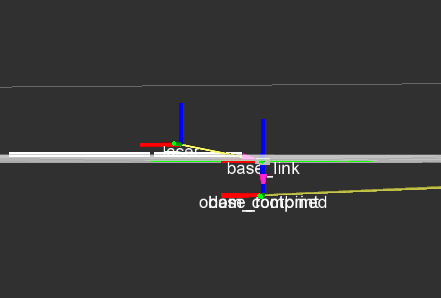
Update: The odom_combined frame is also below the ground by 16 cm and is aligned with the base_footprint frame to start with:
Update 2:
The output of rosrun tf tf_echo map odom_combined is :
At time 1435579139.606
- Translation: [2.414, 1.156, -0.160]
- Rotation: in Quaternion [-0.003, 0.015, 0.680, 0.733]
in RPY [0.016, 0.025, 1.496]
At time 1435579140.606
- Translation: [2.414, 1.156, -0.160]
- Rotation: in Quaternion [-0.003, 0.015, 0.680, 0.733]
in RPY [0.016, 0.025, 1.496]
Thanks in advance.
Naman Kumar


There might be a problem with map->odom_combined tf. What is the output of
rosrun tf tf_echo map odom_combined?Thanks for the reply. I have updated my original question. Please have a look. TIA
So, 16 cm of difference in Z-direction is caused by that tf.
map->odom_combinedis provided byamclnode. I'm not experienced enough to pinpoint the error by looking at this information. I suspect there is something wrong with your amcl parameters. Maybe you should share your launch file too.