
Problem about turtlebot_kinect_arm_calibration
Hi all,
I'm using ubuntu 14.04.1 with ROS indigo. I met problem whey trying to calibrate my turtlebot arm with kinect, following this tutorial. The problem was shown as follows:
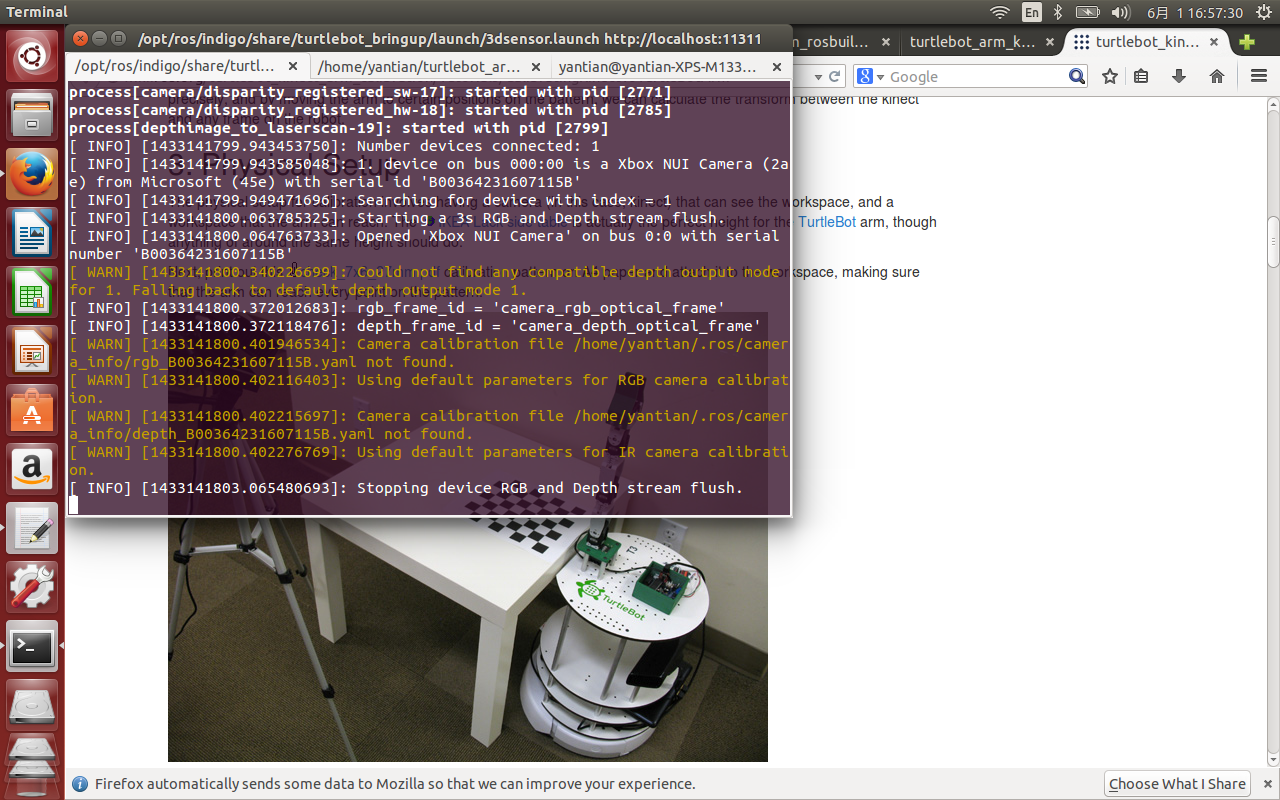 I found out that both roslaunching 3dsensor.launch or freenect.launch can start up the kinect. But I'm confused about the line: Stopping device RGB and Depth Stream flush.
I found out that both roslaunching 3dsensor.launch or freenect.launch can start up the kinect. But I'm confused about the line: Stopping device RGB and Depth Stream flush.
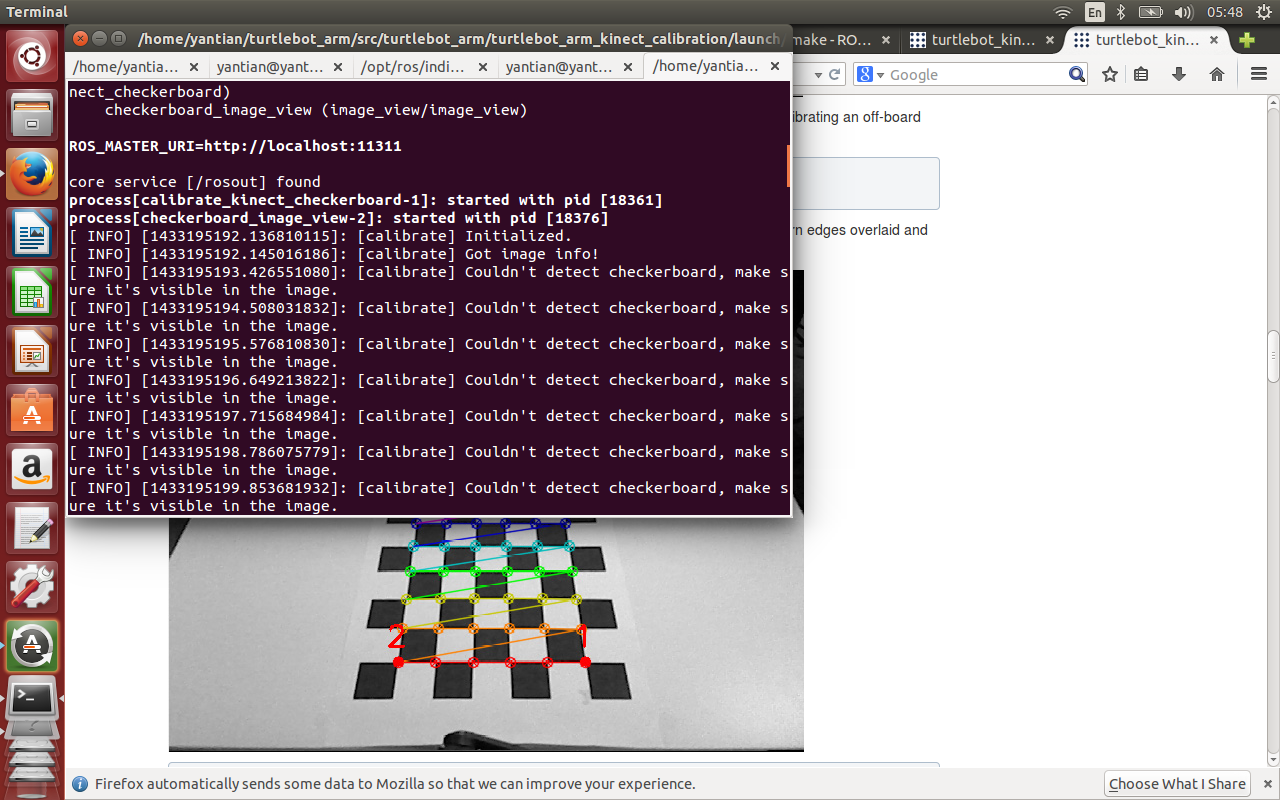 I can't understand why the kinect can't detect the checkerboard, because I got the image, and got the checkerboard under my camera. This is somewhat tricky.
I can't understand why the kinect can't detect the checkerboard, because I got the image, and got the checkerboard under my camera. This is somewhat tricky.
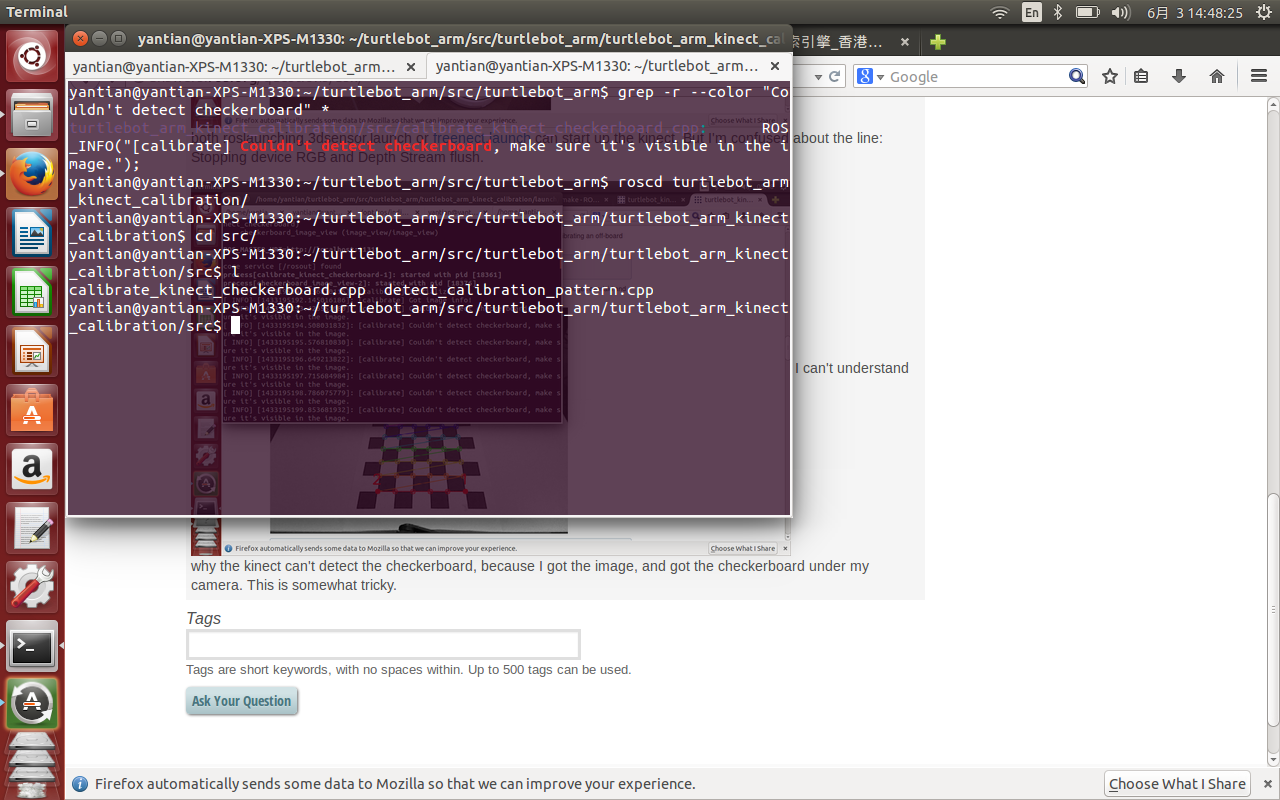 From the source code I couldn't find out how this error happens.
From the source code I couldn't find out how this error happens.
Thanks very much!
add a comment
