
Do not allow the robot to plan in unknow region for navigation. Parameters to set apart from allow_unknown [closed]

Hi all,
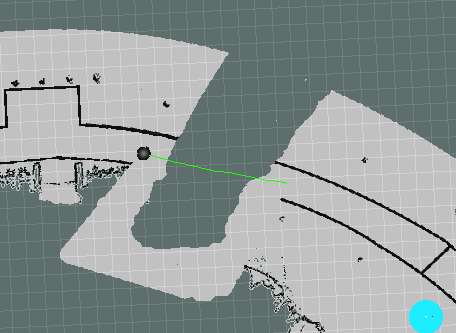
I want to make sure that the robot does not plan through the unknow regions of the map. The map looks as follows:
I have set the allow unknown parameter in "base_global_planner_param.yaml" as follows:
NavfnROS:
allow_unknown: false
and also set the track unknow region parameter in
global_costmap:
map_type: costmap
global_frame: map
robot_base_frame: base_link
track_unknown_space: true
unknown_cost_value: 0
update_frequency: 5.0
static_map: true
It still plans a path as shown in above image. I have also played with unknown_cost_value parameter, (both 0 and 255), and still no avail.
The objective is to make sure that the robot does not plan apart from a specific region. I intended to edit the map so that i make all the regions grey where i do not want to plan them.
I use a preloaded map and not a live map from gmapping.
Any suggestions are appreciated.
Thanks,

Which version of ROS?
Currently using ubuntu 14.04 and ros indigo. I think I've solved the issue, but would you mind checking out my post for a follow up question and confirm that the fix was done properly?