
problem with frontier_exploration pkg
Hi,
I setup frontier_exploration on my Kobuki base with URG-04LX lidar. worked the Clearpath's Husky_Navigation demo tutorial to get to the point of testing autonomous exploration with the frontier_exploration package.
right now every component works good:
- Gmapping runs and builds a good map of the area,
- Move_base runs and navigates to a manually set goal,
But the problem that i'm stuck with is that when i add the Marker topic to RVIZ and do a Polygon with the "Publish Point" tool, although i close the Polygn sides, i can NOT get it to accept it and turn Red (as in accepted). it only happens once in every 10 or so attempts, then it asks me to put a start off point. i do that and my robot goes to that very point i put and stays there.
my tf tree is good, i got great odometry, map lines are all aligned. /explore_serve and /explore_client nodes are also checked active.
EDIT: here is a picture of my nodes/topics: 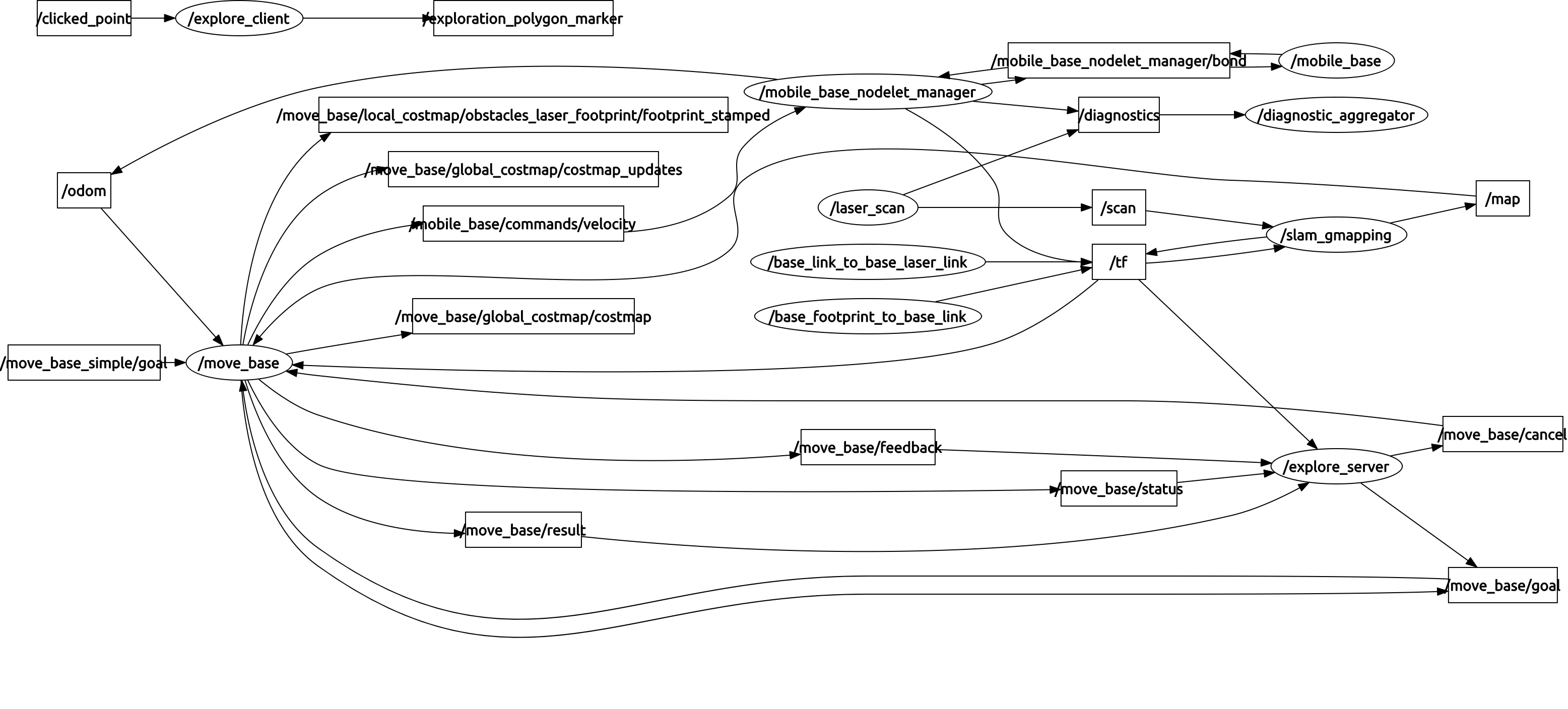
any help, ideas or suggestions to further reconfigure the settings are more than welcomed...!
EDIT2:
Explorer Launch file:
<launch>
<node pkg="frontier_exploration" type="explore_client" name="explore_client" output="screen"/>
<node pkg="frontier_exploration" type="explore_server" name="explore_server" output="screen">
<param name="frequency" value="1.0"/>
<!-- Should be less than sensor range -->
<param name="goal_aliasing" value="2.0"/>
<rosparam file="$(find husky_navigation)/config/costmap_common.yaml" command="load" ns="explore_costmap" />
<rosparam file="$(find husky_navigation)/config/costmap_exploration.yaml" command="load" ns="explore_costmap" />
<remap from="/base_link" to="/base_footprint" />
</node>
</launch>
costmap_common.yaml :
footprint: [[-0.125, -0.125], [-0.125, 0.125], [0.125, 0.125], [0.125, 0.0], [0.125, -0.125]]
robot_radius: 0.2
#footprint: [[-0.5, -0.33], [-0.5, 0.33], [0.5, 0.33], [0.5, -0.33]]
footprint_padding: 0.01
robot_base_frame: base_footprint
update_frequency: 4.0
publish_frequency: 3.0
transform_tolerance: 0.5
resolution: 0.05
obstacle_range: 3.0
raytrace_range: 4.0
#layer definitions
static:
map_topic: /map
subscribe_to_updates: true
obstacles_laser:
observation_sources: laser
laser: {data_type: LaserScan, clearing: true, marking: true, topic: scan, inf_is_valid: true}
inflation:
inflation_radius: 0.25
costmap_exploration.yaml :
track_unknown_space: true
global_frame: map
rolling_window: false
plugins:
- {name: external, type: "costmap_2d::StaticLayer"}
- {name: explore_boundary, type: "frontier_exploration::BoundedExploreLayer"}
#Can disable sensor layer if gmapping is fast enough to update scans
- {name: obstacles_laser, type: "costmap_2d::ObstacleLayer"}
- {name: inflation, type: "costmap_2d::InflationLayer"}
explore_boundary:
resize_to_boundary: true
frontier_travel_point: middle
#set to false for gmapping, true if re-exploring a known area
explore_clear_space: false
PS: i downloaded the husky_navigation package to try frontier exploration out, used its provided materials and edited them to fit my robots specifications. with the same setup (with the same config files) gmapping and move_base navigation work flawlessly.
EDIT: as per dear "pbovbel" instructions i upgraded the package to a newer version (shadow repo) and the Polygon issue seems gone for the moment (pretty nice!) but the other issue still kind of remains; when setting the "initial point" robot only clears the area that is around it (as seen in the picture below) it leaves some ...


Were you able to edit the launch files to get the robot to explore the whole space? I have tried reducing inflation radius as paulbovbel suggested, however the robot does not explore the complete space in the polygon boundary.Any help from you would be deeply appreciated.
@RS Unfortunately i was not able to do that.