
unwanted rotation of the markers detected with ar_track_alvar

hello!
I discovered something weird with ar_track_alvar but maybe I just forgot something when launching it.
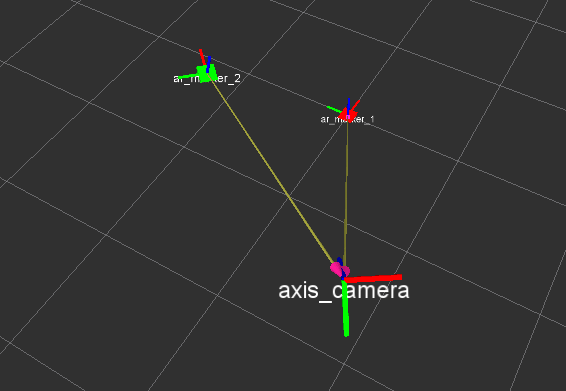
I put a mark on the head of a robot and another one one the ground, this is when it is working fine:
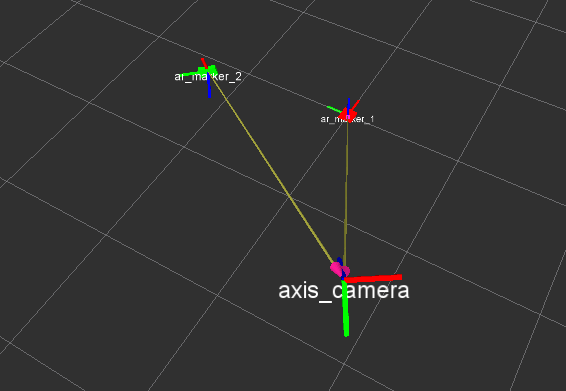
but if i make the robot turn a little bit mor to the left, a PI rotation relative to the green axe seems to be made :
I set up a static_transform_publisher between "/axis_camera" and "/map, then I set the "output_frame" argument of ar_track_alvar to "/axis_camera" and the rest of the launchfile is identical to "pr2_indiv_no_kinect.launch".
The problem is not happening with the mark on the ground if i make it turn.
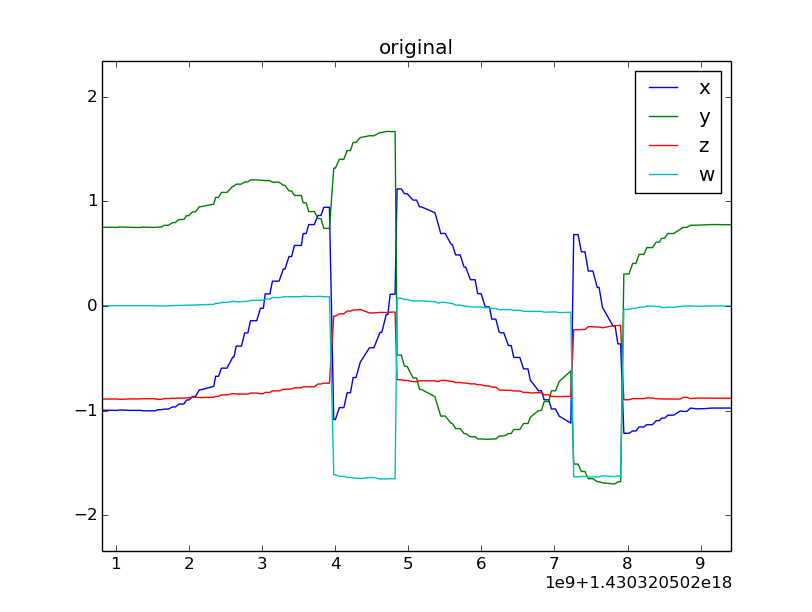
If it can give a clue, here is the rotation data of the mark when my robot make a complete turn:
I am grateful for any help!


I am trying to improve camera calibrations, it might solve the problem, I will let you know !