
Sick S300 and HectorSlam
Hello People, I set up a System with a Sick S300 laser scanner and hector slam, since I have no odometry to give to rviz.
I am working witht the cob_sick_s300 package and hector mapping.
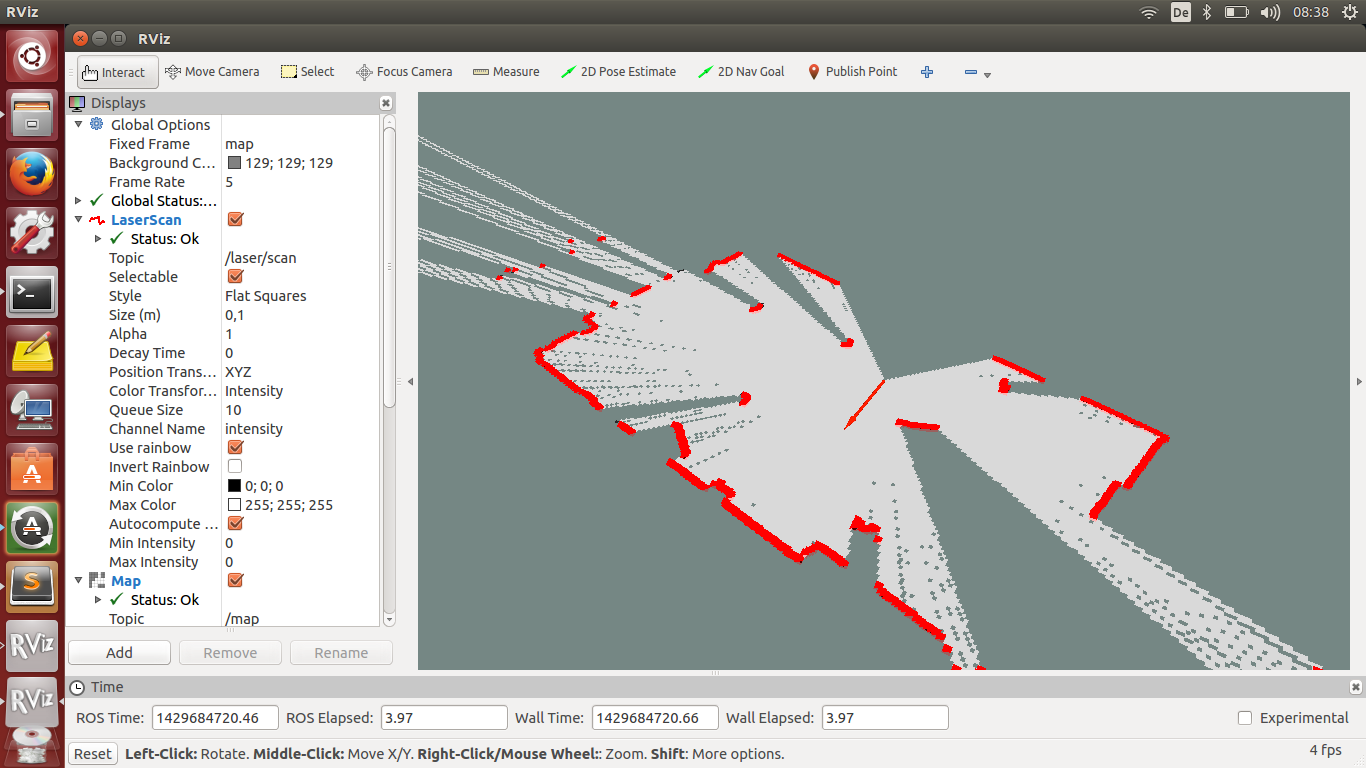
I tried to walk around with the laser scanner and get a map, unfortunately it doesnt work that good. I am posting a picture of the Map here.
I am also inserting my launch-files so that anybody can try it. should work out of the box EDIT:
I found the error and with this update I can provide any user an out of the box solution for the laserscanner. The error can be found in fields in the yaml file, I am posting the new one here:
port: /dev/ttyUSB0
baud: 500000
scan_duration: 0.025 #no info about that in SICK-docu, but 0.025 is believable and looks good in rviz
scan_cycle_time: 0.040 #SICK-docu says S300 scans every 40ms
inverted: false
scan_id: 7
frame_id: /camera_link
scan_intervals: [[-1.3526, 1.361357]] #[rad] these intervals are included to the scan
fields:
'1':
scale: 0.01
start_angle: -2.355
stop_angle: 2.355
# '2':
# scale: 2.0
# start_angle: -11.0
#stop_angle: 12.0
with this I get the following map:
 Which is pretty satisfying :) contact me if u need help! :)
Which is pretty satisfying :) contact me if u need help! :)
s300_launch.launch
<launch>
<!-- start laser driver -->
<node name="laser" pkg="cob_sick_s300" type="cob_sick_s300" respawn="false" output="screen">
<rosparam command="load" file="s300_config.yaml"/>
</node>
</launch>
hector_mapping.launch
<launch>
<node pkg="tf" type="static_transform_publisher" name="map_to_scanmatcher" args="0 0 0 0 0 0 /map /hector_mapping 100"/>
<node pkg="tf" type="static_transform_publisher" name="map_to_base_footprint" args="0 0 0 0 0 0 /map /base_footprint 100"/>
<node pkg="tf" type="static_transform_publisher" name="base_footprint_to_base_link" args="0 0 0 0 0 0 /base_footprint /base_link 100"/>
<node pkg="tf" type="static_transform_publisher" name="base_link_to_base_stabilized" args="0 0 0 0 0 0 /base_link /base_stabilized 100"/>
<node pkg="tf" type="static_transform_publisher" name="base_stablized_to_base_frame" args="0 0 0 0 0 0 /base_stabilized /base_frame 100"/>
<node pkg="tf" type="static_transform_publisher" name="base_frame_to_laser_link" args="0 0 0 0 0 0 /base_frame /camera_link 100"/>
<node pkg="tf" type="static_transform_publisher" name="base_to_nav_link" args="0 0 0 0 0 0 /base_frame /nav 100"/>
<arg name="tf_map_scanmatch_transform_frame_name" default="scanmatcher_frame"/>
<arg name="base_frame" default="base_footprint"/>
<param name="pub_map_odom_transform" value="true"/>
<param name="map_frame" value="map" />
<param name="base_frame" value="base_frame" />
<param name="odom_frame" value="base_frame" />
<arg name="odom_frame" default="nav"/>
<arg name="pub_map_odom_transform" default="true"/>
<arg name="scan_subscriber_queue_size" default="5"/>
<arg name="scan_topic" default="laser/scan"/>
<arg name="map_size" default="2048"/>
<node pkg="hector_mapping" type="hector_mapping" name="hector_mapping" output="screen">
<!-- Frame names -->
<param name="map_frame" value="map" />
<param name="base_frame" value="$(arg base_frame)" />
<param name="odom_frame" value="$(arg odom_frame)" />
<!-- Tf use -->
<param name="use_tf_scan_transformation" value="true"/>
<param name="use_tf_pose_start_estimate" value="false"/>
<param name="pub_map_odom_transform" value="$(arg pub_map_odom_transform)"/>
<!-- Map size / start point -->
<param name="map_resolution" value="0.050"/>
<param name="map_size" value="$(arg map_size)"/>
<param name="map_start_x" value="0.5"/>
<param name="map_start_y" value="0.5" />
<param name="map_multi_res_levels" value="2" />
<!-- Map update parameters -->
<param name="update_factor_free ...
Hello Feliz. Using your open invitation...
I can see you are working with Hector. Could you give a look to my last question? I'm having some issues with it's performance. Thank you!
Dear feliz, i tried to create map using the above launch files and i am getting the error
ERROR: cannot launch node of type [cob_sick_s300/cob_sick_s300]: can't locate node [cob_sick_s300] in package [cob_sick_s300].. can u help me? thank u! regards krishnakumar