
robot_state_publisher link publish frequency not consistent

I have a urdf model of a human hand in Rviz for which I update its position via my own tf broadcaster. I have noticed that when I move the hand the fingers lag behind the wrist. I am updating the position of the wrist at 100 Hz and in my launch file, I set the parameter of robot_state_publisher to 100 Hz as well.
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher">
<rosparam param="publish_frequency">100</rosparam>
</node>
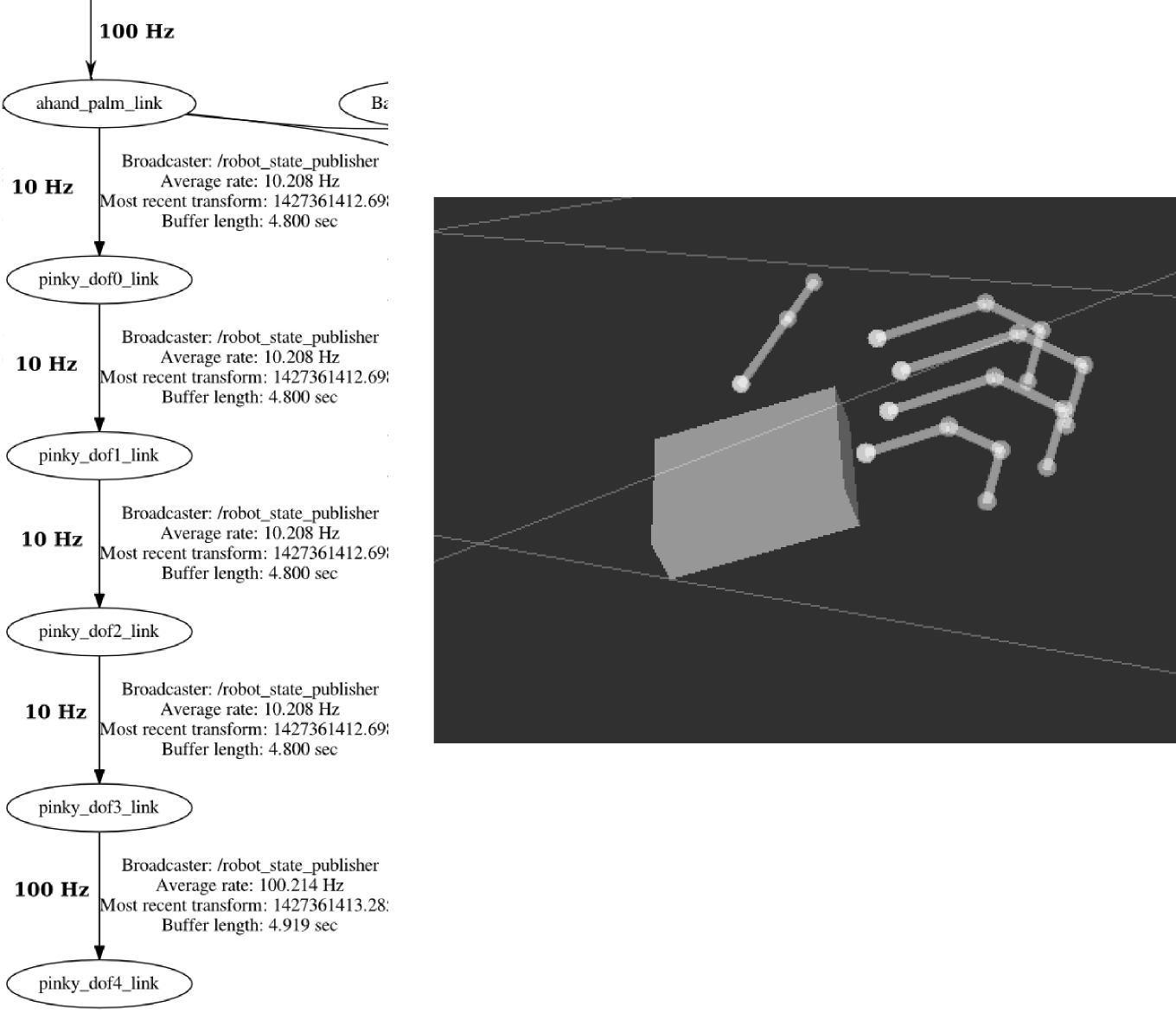
When I look at the rate at wich the tf frames are being published (from rosrun tf view_frames) the update of the palm (first link) is at 100 Hz and the last link "pinky_dof_4" is also updated at 100 Hz. However everything in between is being updated at 10 Hz. I would like to get all links in the URDF to be updated at 100 Hz.
add a comment

