How to use laser_scan_matcher with depthimage_to_laserscan and gmapping?
I am kinda new to ROS here, so please help me out accordingly.
I am using ROS Indigo on a Ubuntu 14.04 system. I am using an Asus XTion Pro Live to record a bag file of the /scan topic that I am getting from depthimage_to_laserscan node. I can view the scan properly in rviz and also through rosbag play.
Now, the issue is that I want to use gmapping to perform some basic SLAM but I don't have an /odom topic. So I thought of using laser_scan_matcher to get the Pose2D from my "fake" laser scans.
I tried out the demo given here and it worked perfectly. However, when I try it with my own bag file, I don't get any output in rviz.
How can I use laser_scan matcher output with rviz?
EDIT:
Here is what I'm doing so far
1.
roscore
2. roslaunch openni2_launch openni2.launch
3. rosrun depthimage_to_laserscan depthimage_to_laserscan image:=/camera/depth/image_raw
4. rosrun laser_scan_matcher laser_scan_matcher_node Here is the error I get from laser_scan_matcher
Could not get initial transform from base to laser frame, "base_link" passed to lookupTransform argument target_frame does not exist.
Skipping scan
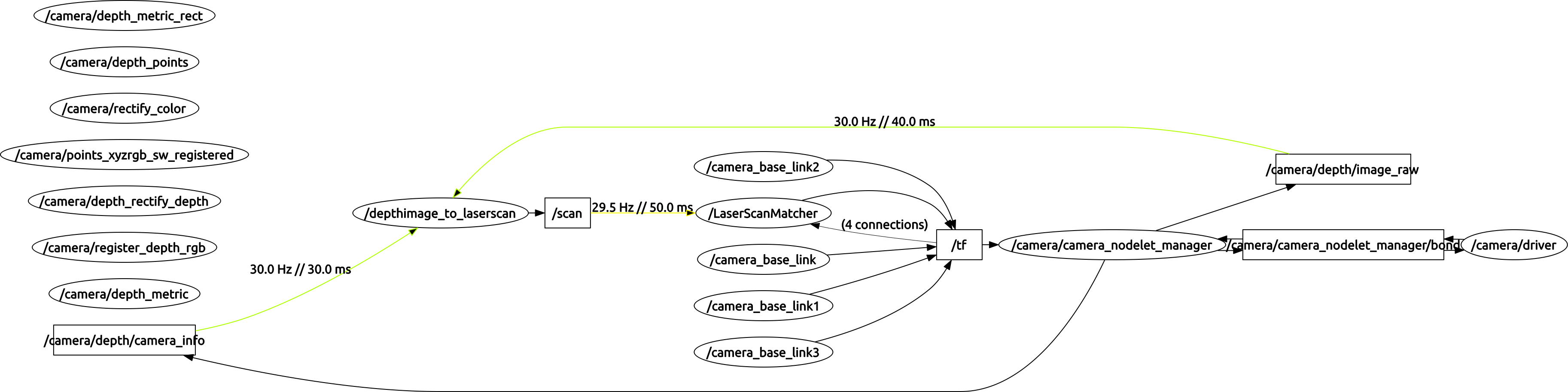
Here is my rqt_graph