
How does gmapping detect loop closure?
I want to know the way to detect loop closure in gmapping package. I couldn't find loop closing method in gmapping papers.
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
I want to know the way to detect loop closure in gmapping package. I couldn't find loop closing method in gmapping papers.
gmappinp Parameter resampleThreshold handles this.
~resampleThreshold (float, default: 0.5) The Neff based resampling threshold
Neff drops in case of loop closures.
gmapping does resampling based on Neff threshold in case of loop closure.
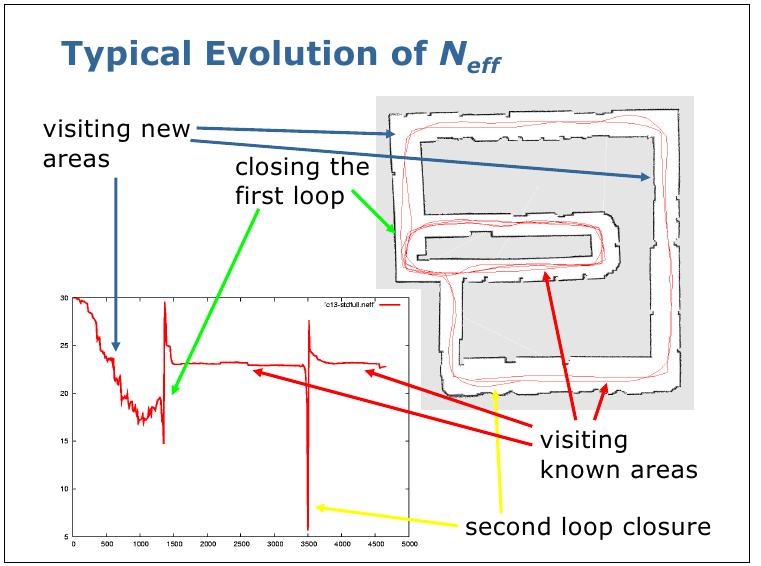
Check rbpf slam tutorial . Pictures is from these slides.
I tried using a Neff value of 0.8 and it seemed to make things better in terms of updating the map. According to the slides: "We only resample when Neff drops below a given threshold (N/2)" So setting resampleThreshold to 0.8 instead of 0.5 means resampling is done when fewer particles are needed to reach the sampling threshold.
Asked: 2014-12-18 15:06:10 -0500
Seen: 4,538 times
Last updated: Dec 19 '14
gmapping and inverted (upside-down) laser
problem building my map using SLAM
turtlebot estimates wrong 2D pose on rviz when using amcl_demo
robot_localization and gmapping - how the transform should be done?
Is it possible to use amcl and slam gmapping at the same time?
How to create map with gmapping
multi robot TF drifting in navigating to goal
How to do GMapping and SLAM Navigation using RPLIDAR A2 and Kobuki?
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.

Its through the ICP (iterative closest point) scan matching technique. Read [here].(http://en.wikipedia.org/wiki/Iterative_closest_point)
Thank you for your reply. If loop closure is found, will all historical pose be recalculated? I want to get recalculated pose data. Is there a good method to do that?
Hey! did you end up with loop closures? I can't activate it. set resampleThreshold equal to 1, all the same the new map is superimposed on the old one
@infiniti@AlexR@Kislyy_homyak I am unable to get proper loop closure in gmapping slam, I set the resample Threshold equal to 0.8, were you able to solve this?