
load custom world in gazebo from launch file
Hello everyone,
I've built a custom wold for gazebo (dae file) and I'm trying to load this file from a launch file. When I run the world file directly from gazebo, it woks and I can see the world (gazebo maze.world). But when I build a launch file and include the world file inside the launch file, I get the following error:
Error [SystemPaths.cc:367] File or path does not exist[""]
Error [Visual.cc:2138] No mesh specified
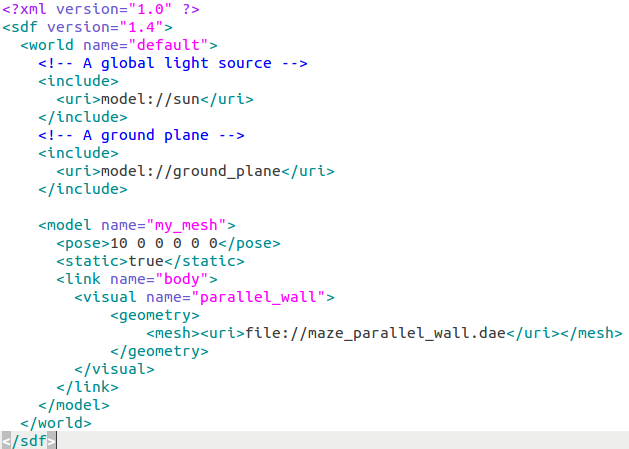
Here is the content of the world file (maze.world):
and here is the launch file(maze.launch):

both launch file and world file are in the same directory and I've set the GAZEBO_MODEL_PATH to that directory. Can someone tell me what's the problem here?
Thanks

The launch file should work as far as I can tell, so it's not a ROS problem probably. Would try out your sdf, to reproduce, but I'm not going to type the text from the image. How exactly does it work from Gazebo directly? By running
$ gazebo maze.worldin the terminal in p3dx_gazebo folder?you can also add the debug argument to your launch file to see if it gives any more information
most probably gazebo just can't find the files. Also just noticed the question is ancient. So never mind.