
urdf_to_collada disrupts the robot model
Hello all
I am interesting in creating a single Collada model out of my robot URDF. I probably doing some thing wrong her a simple example :
my rob.URDF file is :
<?xml version="1.0"?>
<robot name="my_rob">
<link name="base_cylinder">
<visual>
<geometry>
<cylinder length="1" radius="0.1"/>
</geometry>
<material name="blue">
<color rgba="0 0 .8 1"/>
</material>
</visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="1" radius="0.1"/>
</geometry>
</collision>
</link>
<link name="head_box">
<visual>
<geometry>
<box size="0.4 0.4 0.4"/>
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="white">
<color rgba="1 1 1 1"/>
</material>
</visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<box size="0.3 0.3 0.3"/>
</geometry>
</collision>
</link>
<joint name="my_box_joint" type="fixed">
<parent link="base_cylinder"/>
<child link="head_box"/>
<origin xyz="0 0 0.7"/>
</joint>
</robot>
in the RVIZ my model seems OK :
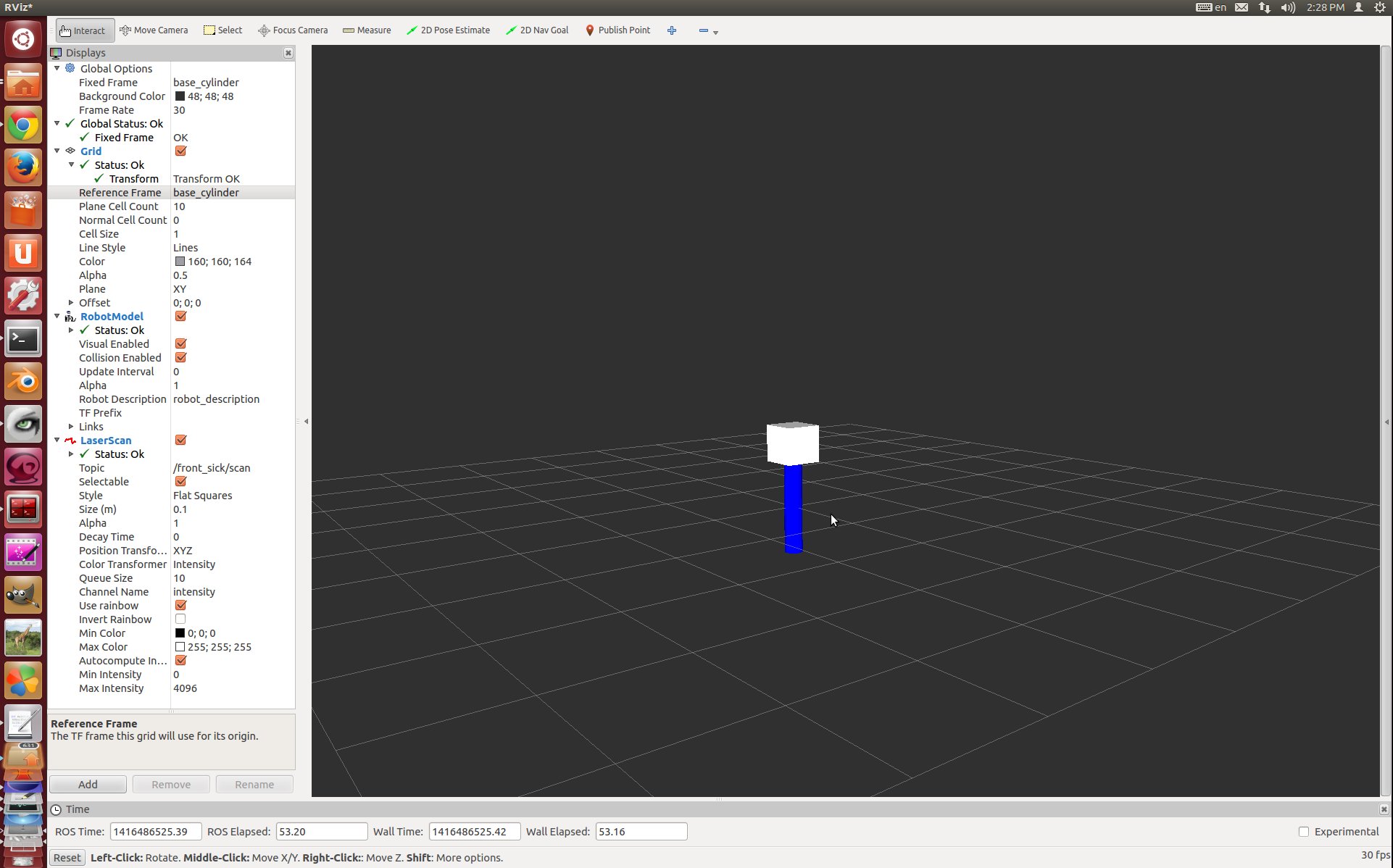
but after i execute :
rosrun collada_urdf urdf_to_collada rob.URDF rob.dae
my rob.dae file looks like this in MeshLab :
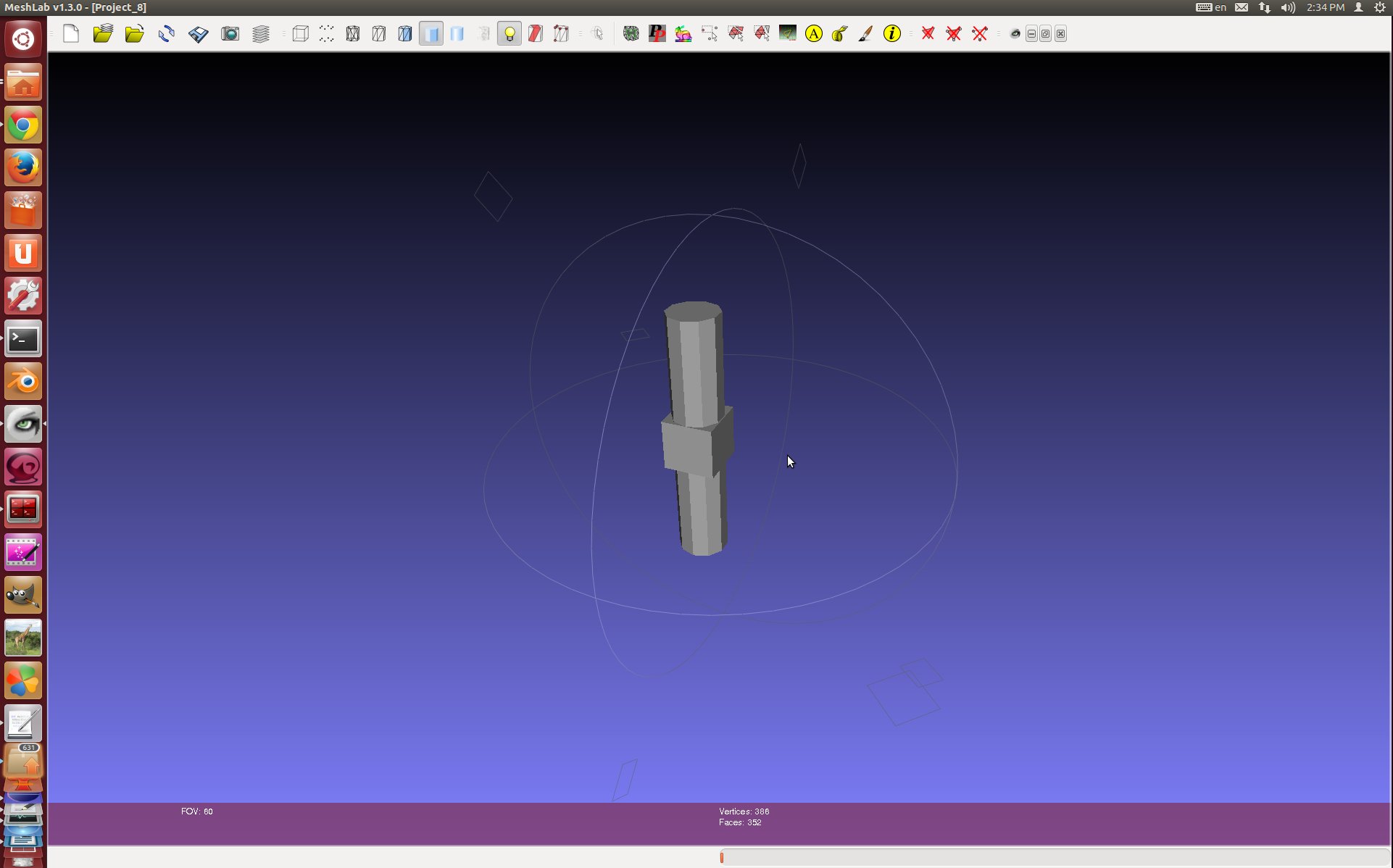
What am i doing wrong ?
add a comment


