
problem with obstacle avoidance and the local planner
Hello,
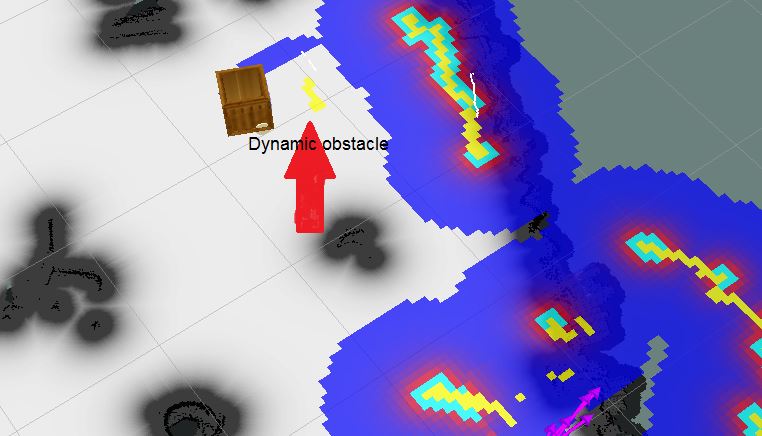
I have a problem regarding obstacle avoidance and local planning. I have a short range Primesense sensor which gives me the scan for my navigation. I am able to do mapping, localization and fairly good navigation when all obstacles are already incorporated in my map. The problem is that dynamic obstacles are detected and shown in my local costmap but the robot does not take them into account somehow. The strange thing for me is that it inflates the obstacles which are in the map but not the dynamic obstacles even though I have inflation_radius set in my local_costmap_params.yaml. I have this suspicion that it might be that the obstacles are only detected 35 cm away from the kinect and otherwise it thinks that the map is clear and since it plans for a short distance in each step it cant detect the obstacles ( I don't know if it makes sense!) I tried changing the sim_granularity: 0.2 but didn't see a difference. Does anyone have an idea about this? I have attached a snapshot of my rviz.
Thanks a lot in advance.

{kind=link}