
Rviz plotting points to the nearest 0.5m in the y-direction

Hi All,
I'm having an issue with Rviz whereby it is plotting my messages (such as odometry, particle arrays and tf) but rounding in discrete units. This is not a problem with graphics cards. The following picture shows what is happening.
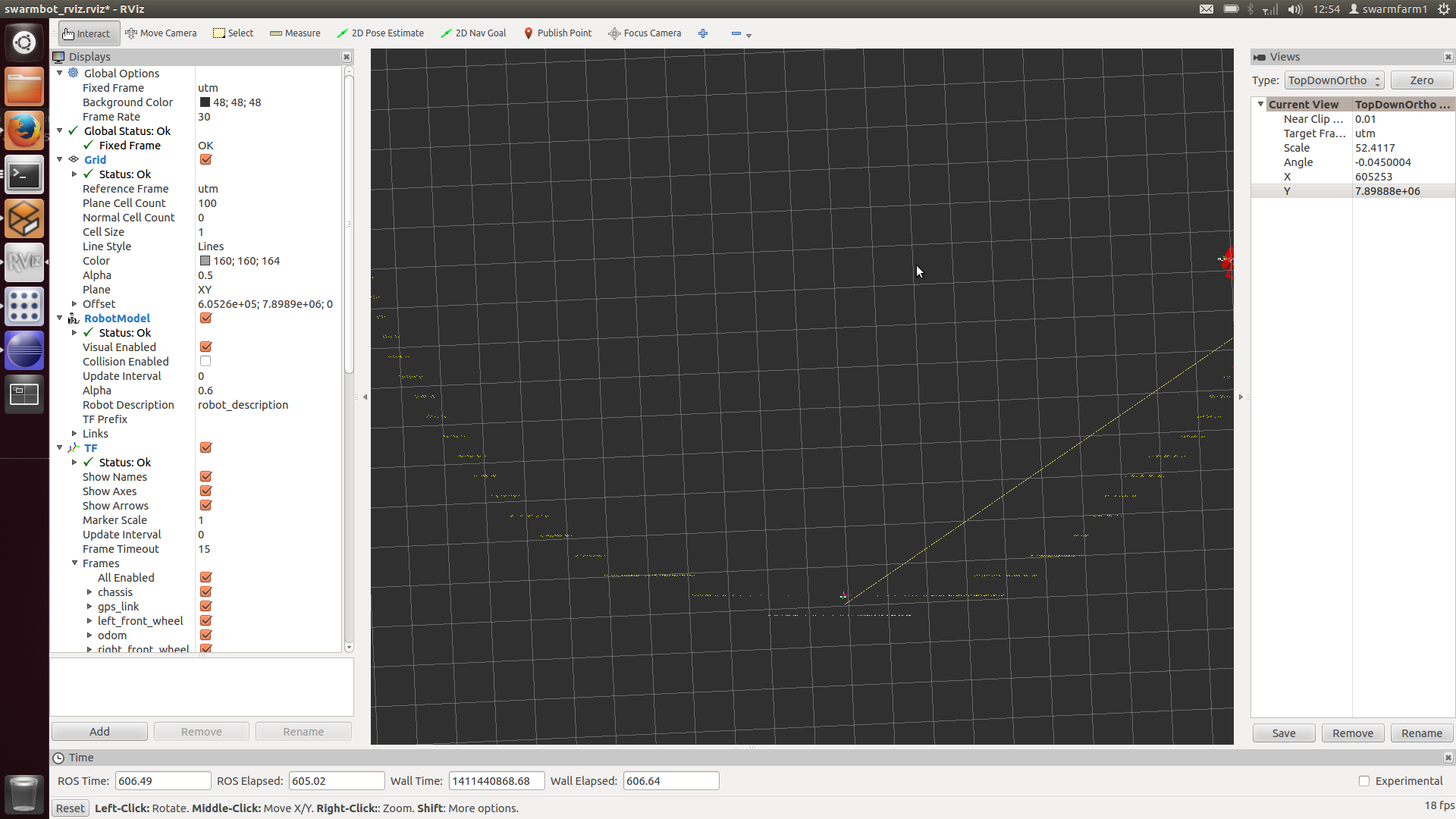
The yellow lines are the odometry arrows which are spaced always 0.5m apart in the y direction. The actual odometry topic is publishing a smooth transition from one point to the next. The spacing between the y directions is always 0.50m, its as if the y value is truncated or rounded to the nearest 0.5m. This also occurs to the tf's and particle poses as a result the particle arrows are sometimes drawn incorrectly (not looking like arrows at all, which seems to be because of this restriction in the y direction). The fixed frame is utm and there is a large number translating from the utm to the odom frame. However tf_echo of that frame does not show jumps in the values of y of 0.5m as shown in a small segment of the output below:
At time 13837.000
- Translation: [605245.313, 7898877.773, 2.823]
- Rotation: in Quaternion [-0.140, 0.024, -0.339, 0.930]
in RPY [-0.281, -0.051, -0.693]
At time 13838.000
- Translation: [605244.946, 7898877.852, 2.747]
- Rotation: in Quaternion [-0.139, 0.022, -0.345, 0.928]
in RPY [-0.277, -0.054, -0.705]
At time 13839.000
- Translation: [605245.021, 7898877.391, 1.007]
- Rotation: in Quaternion [-0.106, 0.006, -0.341, 0.934]
in RPY [-0.204, -0.062, -0.695]
At time 13840.000
- Translation: [605245.342, 7898877.190, 1.031]
- Rotation: in Quaternion [-0.107, 0.006, -0.334, 0.936]
in RPY [-0.205, -0.061, -0.679]
At time 13841.000
- Translation: [605244.806, 7898877.667, 2.324]
- Rotation: in Quaternion [-0.131, 0.020, -0.344, 0.930]
in RPY [-0.261, -0.052, -0.702]
I am working on a new localisation and the raw messages do not exhibit this jerkiness. The jerkiness in the tf and odom is removed when the fixed frame is taken as odom, not utm. The jerkiness remains in the pose array representing the particle cloud. But when echoing the pose array, it displays smooth transitions for all poses, so I think it must be an error in my settings for rviz.
Has anyone had a similar problem with rviz.

