
where does this warning come from in Stage?
Hi, all! I am learning a multi-robot collision avoidance algorithm by using simulator Stage.
please see following image:
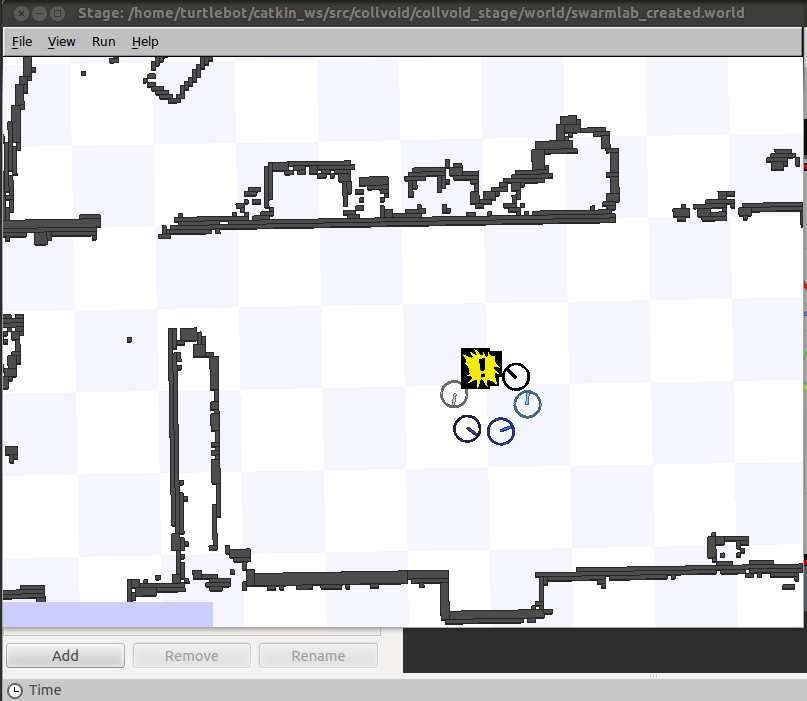
I think the yellow warning( exclamation mark) is saying that two robots crash with each other. I want to know where the code in Stage that this warning comes from, or in other words: what kind of topic is published when a collision is detected and which callback function in Stage is for response when a message( like topic?) about detecting collision is published? Thank you!
add a comment
