
error with tf and laser_scan
I build a navigation stack for my robot. When I roslaunch the launch file, the screen shows "error: couldn't transform from laser to base_footprint, even though the message notifier is in use". After a while, it said "error: couldn't determine robot's pose associated with laser scan". The screen images are shown below. Is there anyone know what's wrong with tf or laser_scan? Thanks very much.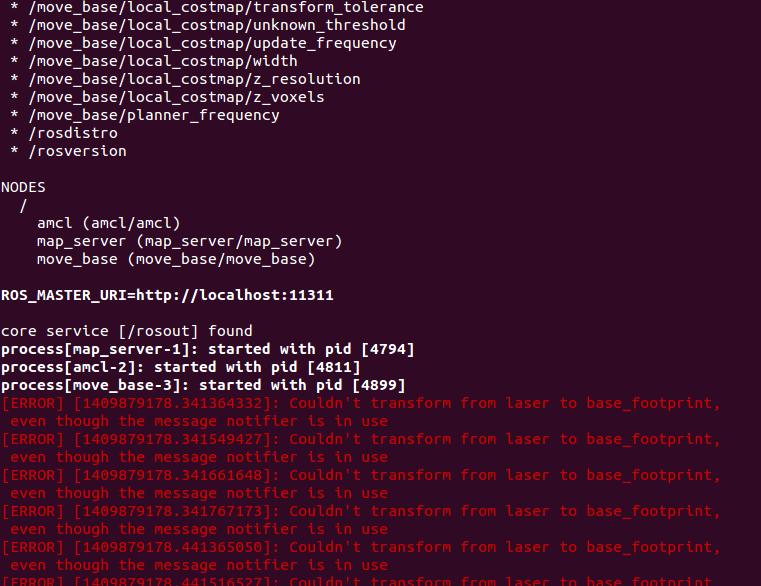


Can you write more info.
@bvbdort, I have write the problem in detail. Do you have some suggestion about the errors?Thanks.
ros version is hydro
take a loot at
rosrun tf view_framesand post frame.pdf , it give more info on tf of your setup.