
Low frequency processing on fovis_ros
Hi there,
I'm trying mono_depth_odometer with a changed topic: /camera/rgb/image_rect_color instead of /camera/rgb/image_rect_mono, since I'm using an Asus Xtion Pro Live with OpenNI2 and can't get any mono topic.
The thing is I have a Haswell i7 3.4Ghz computer running Ubuntu 12.04 with ROS Hydro and still getting a 2/3 hz tf published! :S when echoing the pose I also see that the command line echo log seems very slow.
Here's the tf tree:
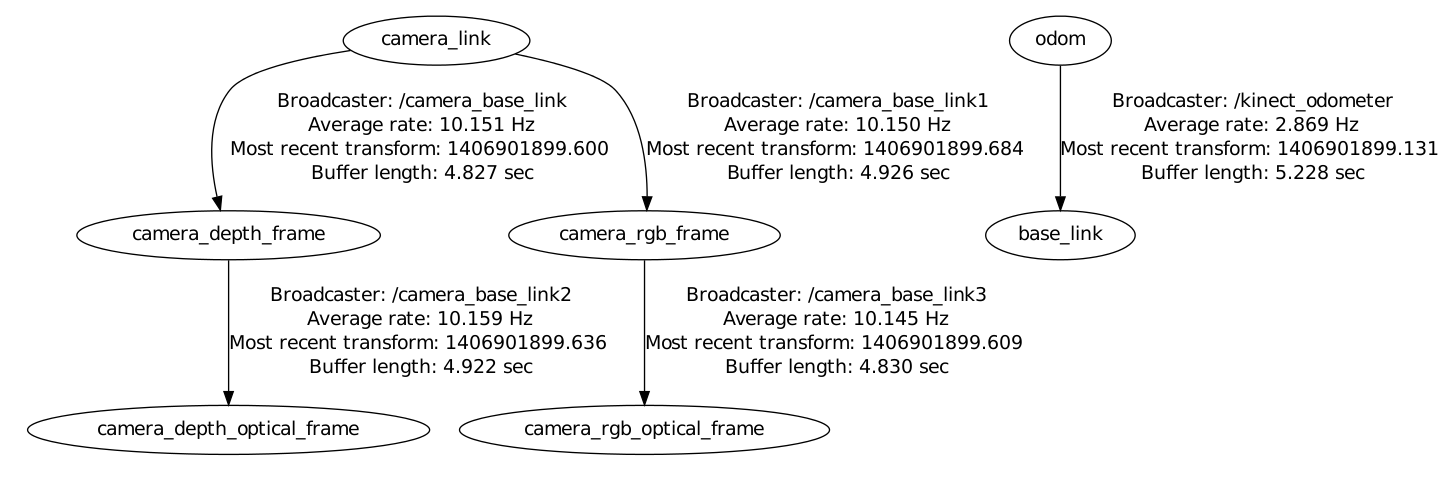
Is there a possible explanation to this? Supposedly this is a "fast" odometry framework, and it's revealing to be slower than the other packages I have here. I'll be using this in a MAV with and Embedded ARM, but first want it to test it in my laptop. If I get this results on my laptop I will probably get even worse in a ARM platform.
Thanks in advance!

Hello TSC. Did you solve this problem? I have a similar one.
Hi @BenediktHeck, not at all! I presented the problem in the github repo of fovis and the dev team didn't apply the enough effort to solve the problem. So, I've left this framework and advanced to another. I advise to do the same
OK. Thank you.
same problem, with asus xtion the frequency update is too slow to do any SLAM
@AlexR the problem was never solved!
I face the same problem too. Here is my solution
Hi @TSC, this post is quite old, but I'm facing the same problem now with fovis. Which framework did you use intead of fovis?