
ros_control spaces

Hi all,
I am currently trying to get my head around ros_control. And I am not sure I fully understand the example given in the overview of ros_control's wiki, the example is show in this image:
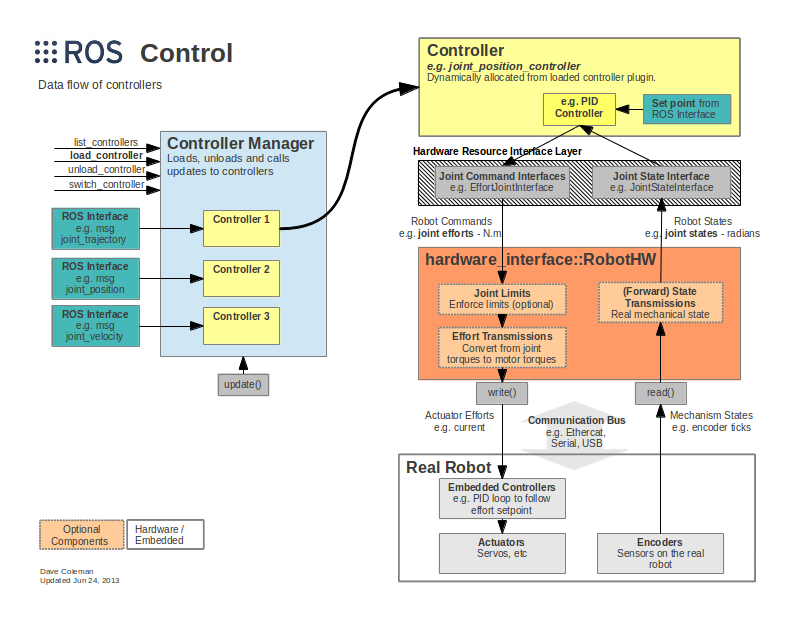
This example actually shows 2 PID:
- one in the real robot: PID loop to follow effort setpoint, in a grey box
- one in a joint_position_controller : PID Controller, in a yellow box
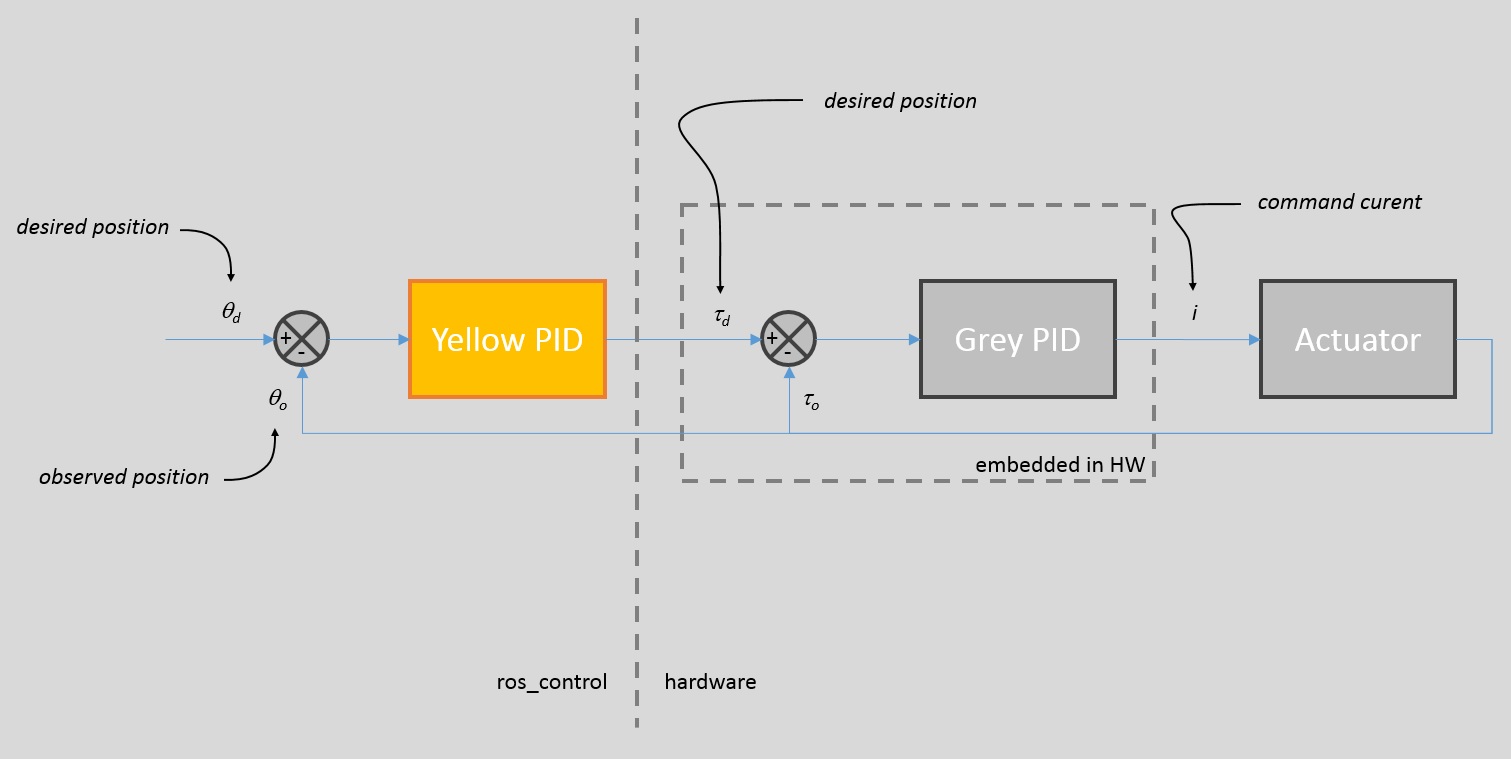
What I understand is that the grey PID is a low-level current control and the yellow PID is a low-level torque control. This is better seen on the block diagram below, which is my understanding of the way things work.
Now in order to get to know more about it I have checked the code for EffortJointInterface in this source file. It turns out EffortJointInterface derives from JointCommandInterface. These classes are nearly empty.
Hence my questions:
- can someone confirm my block diagram is right?
- what is EffortJointInterface doing if there is nothing inside the class?
Thanks,
Antoine.

Is this question still valid or can it be closed?. Since it was asked many interactions have taken place in the robot control SIG.
Question now answered below. Thanks ;)