
Openni_launch cannot subscribe both to depth_registered and rgb
I installed ros-hydro-openni-launch to my Odroid-U3. When I ran
roslaunch openni_launch openni.launch
it successfully streams as I can see the topics send average at 30 fps via the command
rostopic hz /camera/rgb/image_rect_color
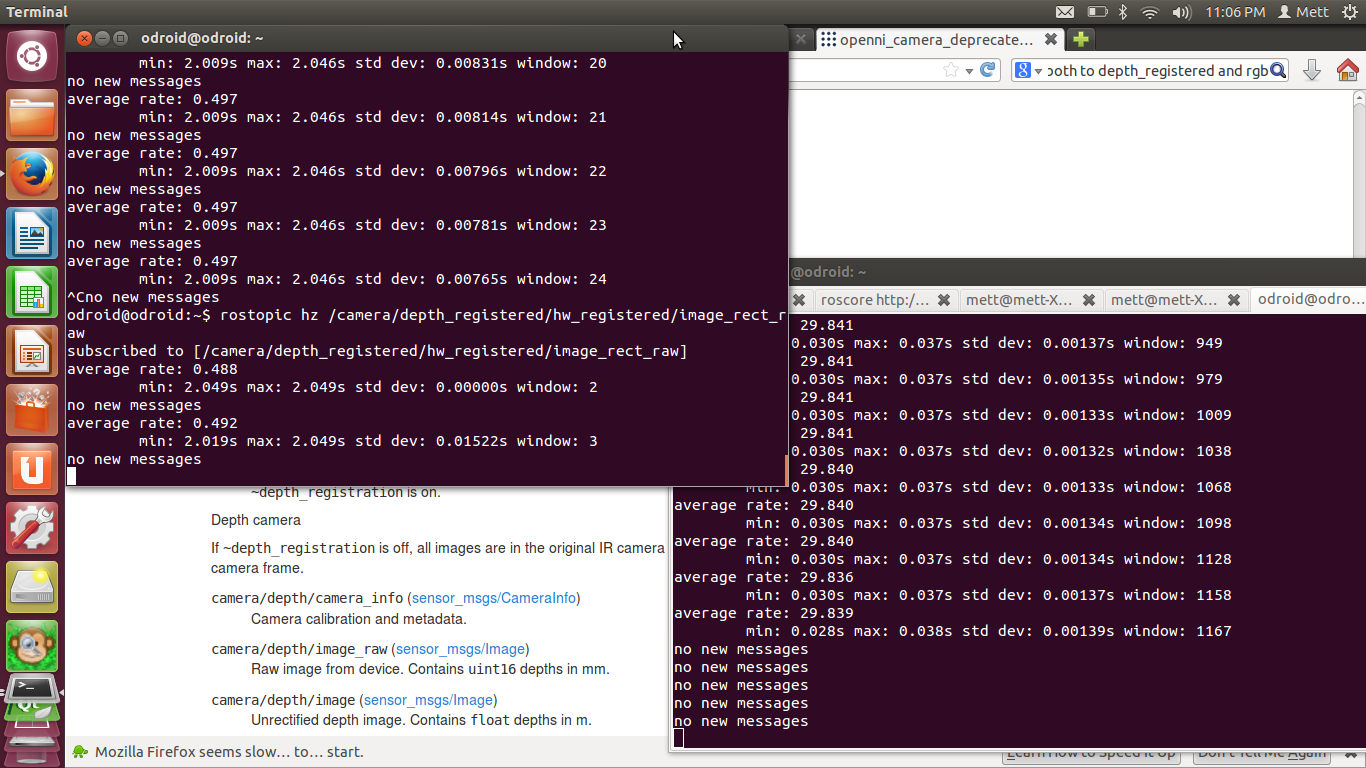
However, once I subscribe also to
rostopic hz /camera/depth_registered/hw_registered/image_rect_raw
Both of the subscribers do not receive any more images as shown below..
Is this a bug? I also downloaded the latest commit of openni_launch and openni_camera in the github. But it was still the same... But they DO WORK alone. But subscribing to both of them fails....
add a comment

