
Could not find a connection between '/map' and '/base_link'
Hi,
I want to calculate robot's current position with respect to the map. Autonomous navigation of ROS works fine.
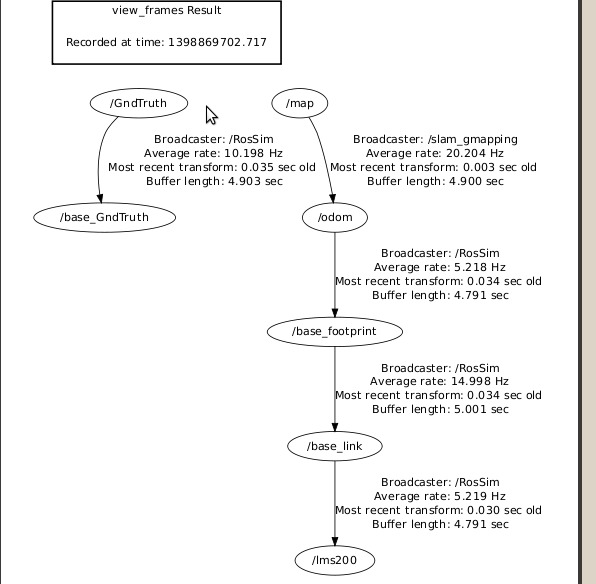
Following is my "rosrun tf view_frames"
I have tried following two commands which gives robot position?? And it works correctly
rosrun tf tf_echo /map /base_link
rosrun tf tf_echo /odom /base_footprint
Code snippet used the listen the transform is given below::::::I have used this code inside a nodelet's init() method..Code compiled successfully. transform and listener are made public class members.
while (nh.ok())
{
//tf::StampedTransform transform;
try
{
//ROS_INFO("Attempting to read pose...");
listener.lookupTransform("/map","/base_link",ros::Time(0), transform);
//listener.lookupTransform("/odom","/base_footprint",ros::Time(0), transform); //SECOND STATEMENT//
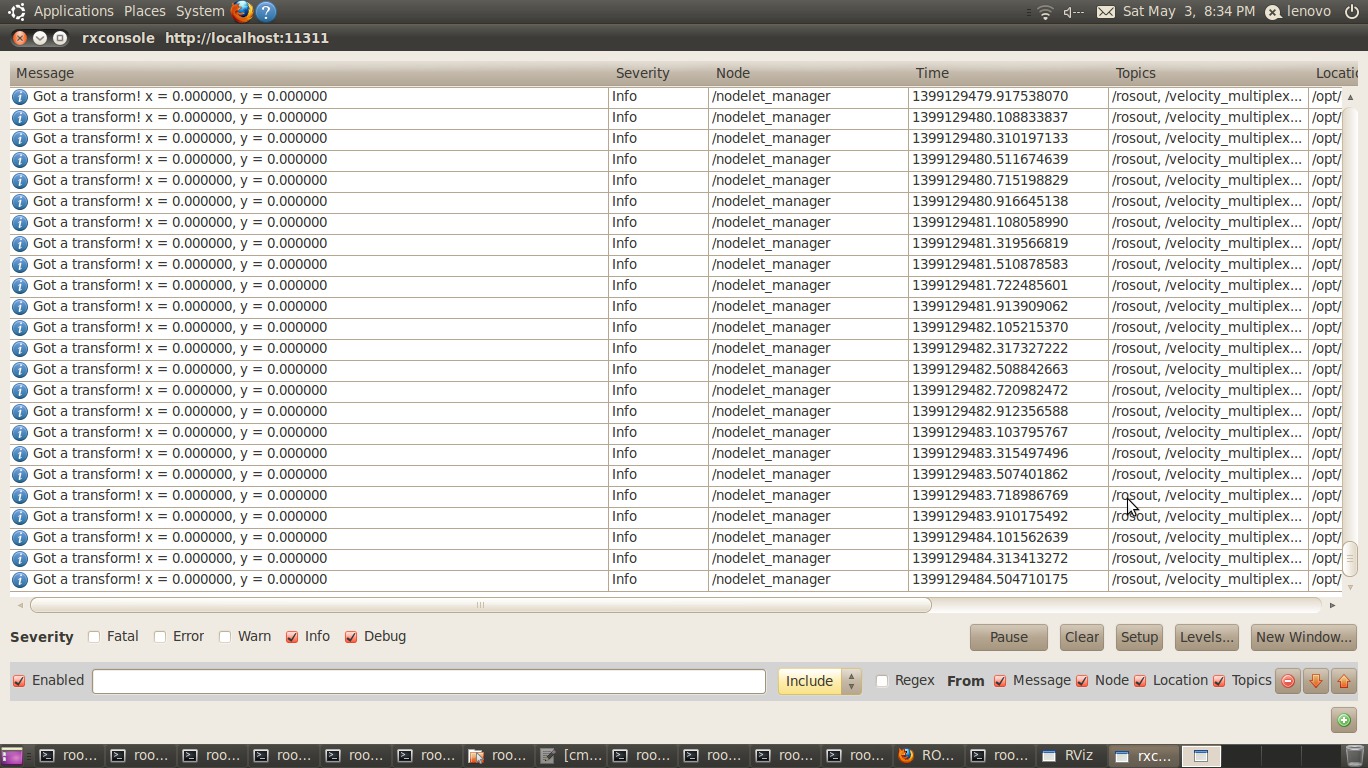
ROS_INFO("Got a transform! x = %f, y = %f",transform.getOrigin().x(),transform.getOrigin().y());
}
catch (tf::TransformException ex)
{
ROS_ERROR("Nope! %s", ex.what());
}
//rate.sleep();
}
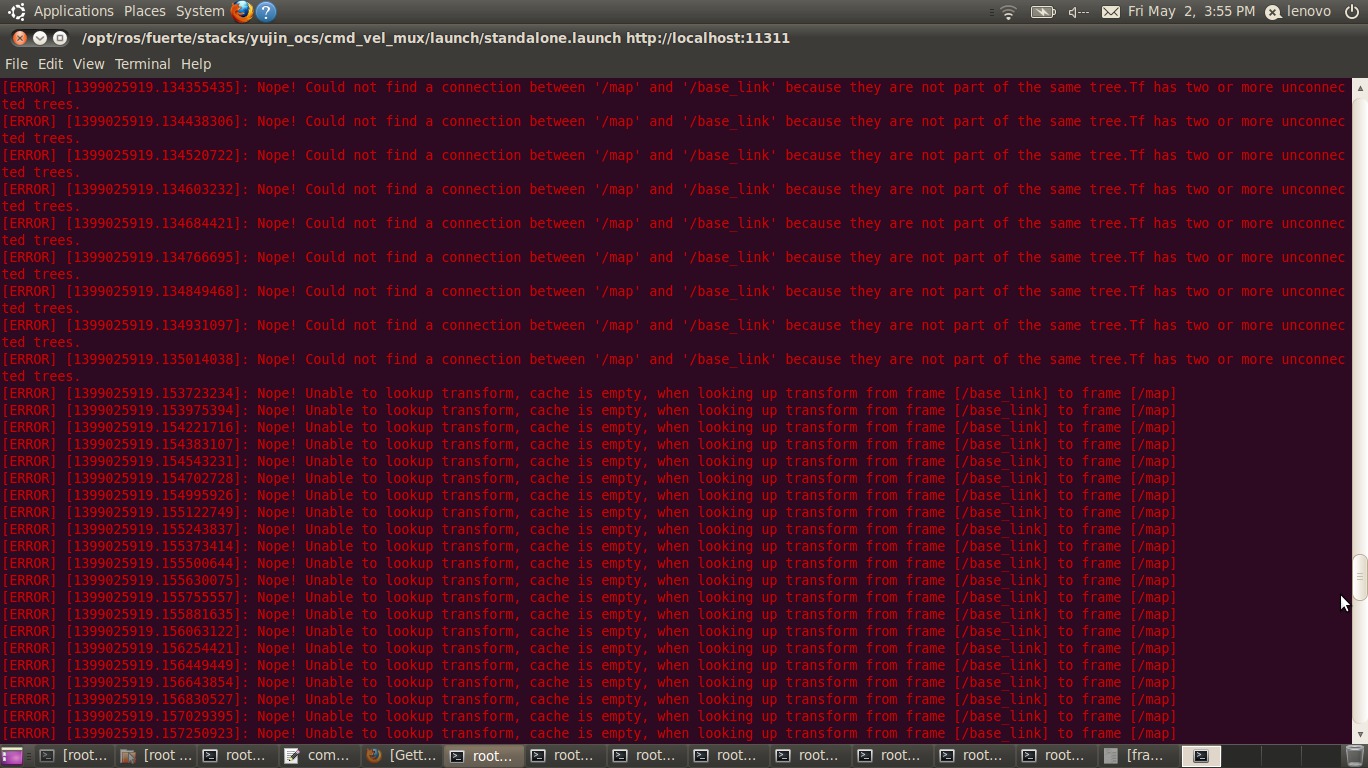
ERROR lookupTransform.jpg
Even if I try "SECOND STATEMENT"(see code snippet), we get following error.
[ERROR] [1399027108.366171508]: Nope! Could not find a connection between '/odom' and '/base_footprint' because they are not part of the same tree.Tf has two or more unconnected trees.
[ERROR] [1399027108.366232448]: Nope! Could not find a connection between '/odom' and '/base_footprint' because they are not part of the same tree.Tf has two or more unconnected trees.
Thank you for any kind of help...................
rxconsole OUTPUT transform.jpg and "rosrun tf tf_echo /map /base_link" output map to base_link.jpg
add a comment


{kind=link}
{kind=link}
{kind=link}
{kind=link}