
How to get robot position (x,y) in a map?
Hi,
I want to calculate robot's current position with respect to the map. Autonomous navigation of ROS works fine. Initially, I thought that by listening to /amcl_pose topic, we can get the current position. But when I do, "rostopic echo /amcl_pose", then there is no such messages.
I am using Pioneer 3 AT, and want to calculate the robot's (center of gravity) position with respect to a known map. (don't want to consider four corners of the robot).
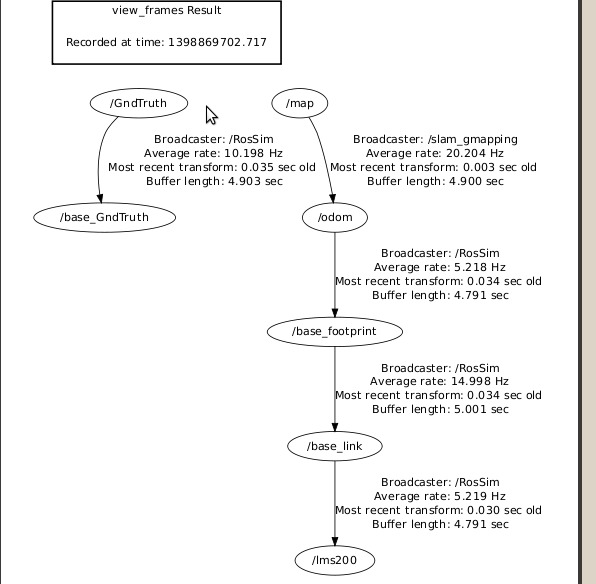
Following is my "rosrun tf view_frames"
In the answer, I get that AMCL usually publishes the position of the robot as a TF transform from the /map frame to the /base_link frame?
But, How to achieve this can you help me with some simple code snippet?
Thanks in advance.........
add a comment


{kind=link}