
A problem on rviz

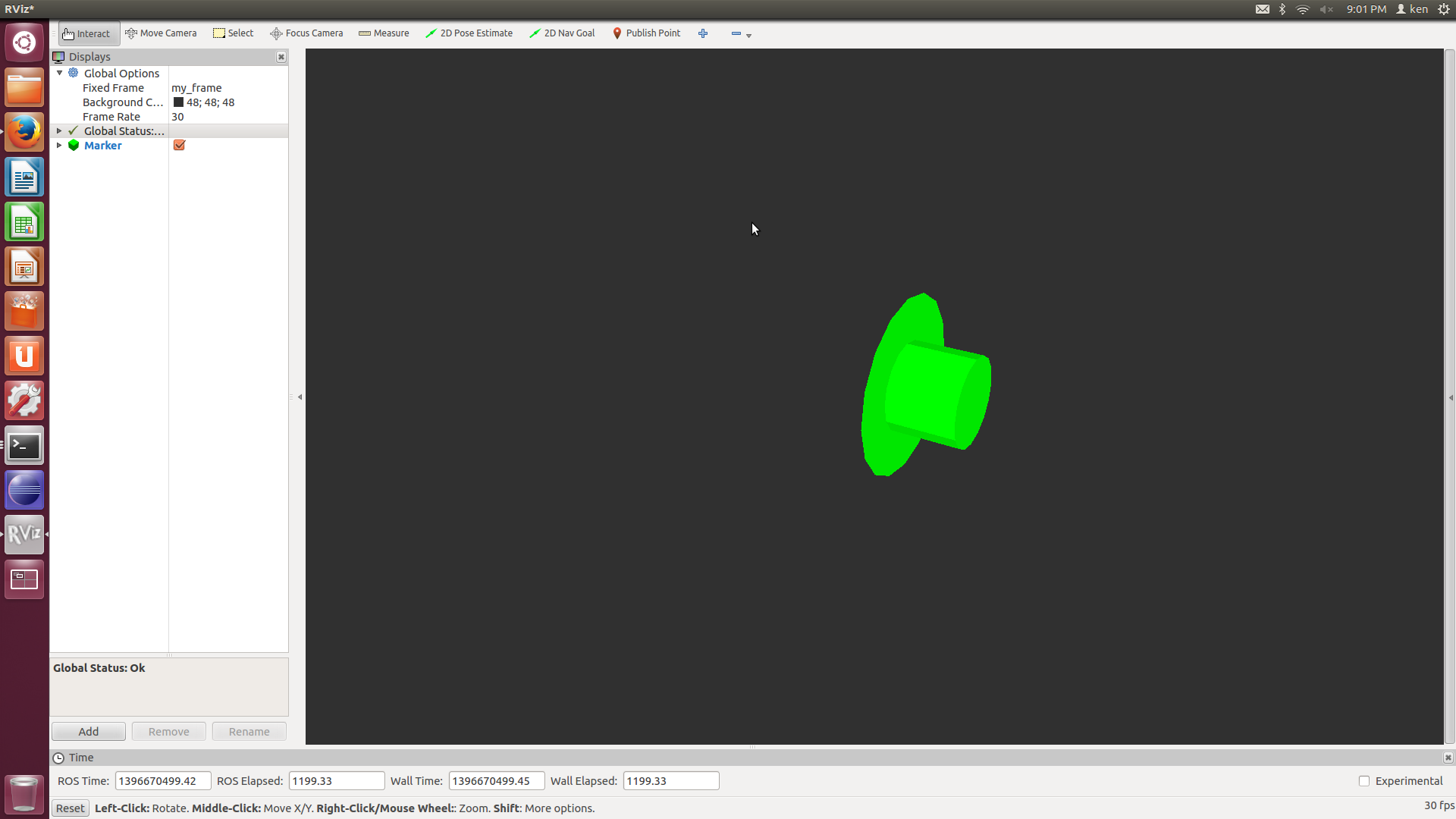
Hi guys, I am using ROS hydro and learning the basis of rviz, following the tutorial in http://wiki.ros.org/rviz/Tutorials/Ma... . But nothing displays on rviz. In Global Options -> Fixed Frame there is only the default option "map", but no "/my_frame" as shown in the link above. I source the setup.bash and set the ROS_PACKAGE_PATH in every termial. Could you please give me some suggestions? Many thanks.
The cpp file is exactly same as shown in the link. The CMakeList is shown below.
cmake_minimum_required(VERSION 2.8.3) project(using_markers)
find_package(catkin REQUIRED COMPONENTS roscpp visualization_msgs )
catkin_package()
include_directories(${catkin_INCLUDE_DIRS})
add_executable(basic_shapes src/basic_shapes.cpp)
target_link_libraries(basic_shapes ${catkin_LIBRARIES})
I also add add_dependencies(basic_shapes using_markers_generate_messages_cpp), but no result either.


i think you have to type the frame name
Just to confirm, have you run catkin_make, and is the basic_shapes node is running?
Hi guys, thanks for your help. @Sai I type the"/my_frame", but it does not work either. @ahendrix I run catkin_make, but what is the node of basic_shapes?
You are trying a command rosrun rviz rviz, aren't you. If you can't look at /my_frame in Fixed Frame in Rviz, /my_frame isn't registered. I think so.
@Ken_in_JAPAN thank you. I think you are right. But could you please tell me how to register the frame? I am nooby to ros. so.. Many thanks.
At first, you should try a command rosrun tf view_frames. More detail are described on a web site. http://wiki.ros.org/tf. If you look at frames.pdf, you have to decide where you put /my_frame. After that, it is better for you to refer static_transform_publisher on same web. I think so.
Hi @Ken_in_JAPAN thank you. I am trying to do it!
did someone get exact solution for this, i followed the instruction in the ans below also but didnt worked. what is exact solution?