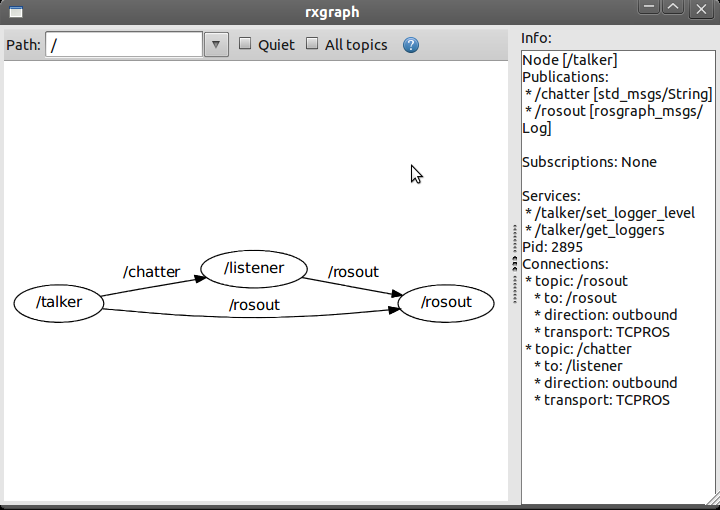
listener.cpp

Hello.. Am at tutorial: Examine simple Publisher and Subscriber.
On command: rosrun beginner_tutorials talker I get proper out "hello world" 233 (so on..) but for command: rosrun begineer_tutorials listener
There is nothing displayed on the terminal:
its just blank ~/ros workspace/beginner_tutorials$ ___(nothing)___
i have re-done file listener.cpp updated Cmakelist.txt, am I suppose to do any other changes??
Thank you!
add a comment