
global_planner finds a path but is not able to find a valid trajectory

Hi, I am trying to use the global planner global_planner.
It finds a path either in dijsktra or A* and changing the different parameters as this image shows
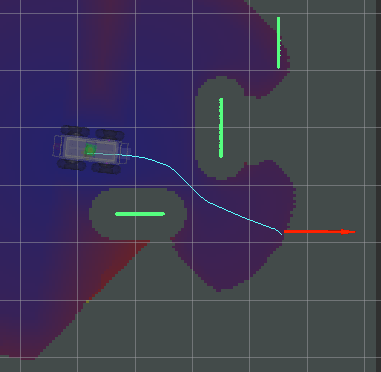
But then the robot stays still and (most of the times) I get this warning:
[ WARN] [1390404456.350870633, 3038.563000000]: Invalid Trajectory 0.000000, 0.000000, -0.300000, cost: -1.000000
until a fatal error appears, after 6 seconds:
[ERROR] [1390404456.403586383, 3038.611000000]: Aborting because a valid control could not be found. Even after executing all recovery behaviors
- Is there some parameter or remap missing in the global_planner wiki?
- Is there any example of the global_planner with a launch and yaml files?
Thanks in advance!
Update
I found out that the global_plan publishes the poses from goal to origin whereas navfn publishes them from origin to goal. I would say this is the problem that makes the robot stay still, I copy a couple of results:
oringin (x≅0) and goal (x≅1) of a path in navfn:
pose:
position:
x: -0.1
y: -0.05
...
pose:
position:
x: 0.998614728451
y: 0.0215734690428
oringin (x≅0) and goal (x≅1) of a path in global_planner:
pose:
position:
x: 1.0
y: 0.0
...
pose:
position:
x: -0.25
y: -0.05
add a comment

