
PR2 Calibration Graphs and Improvement

I've performed the calibration of our PR2 three times, yet it doesn't seem quite calibrated yet. I've been using this tutorial and recommends you view the experimental errors with view_head_laser_scatter.sh et al.
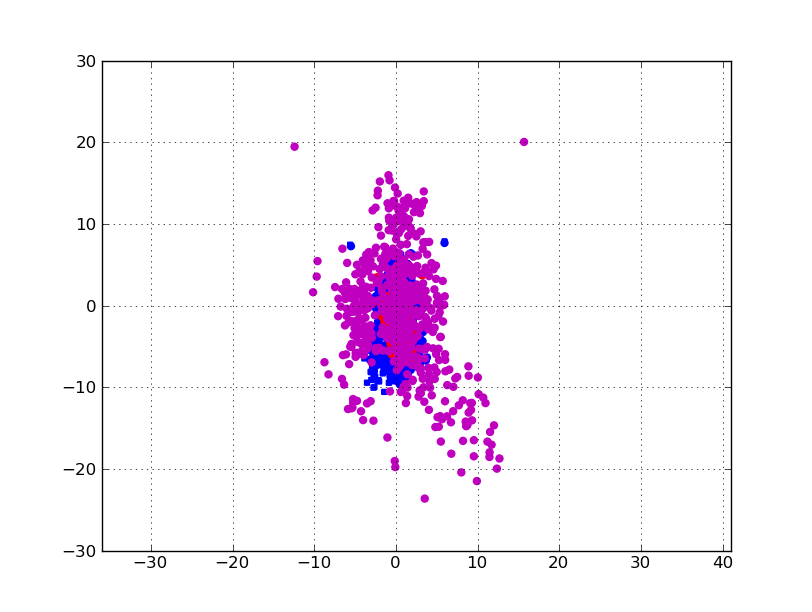
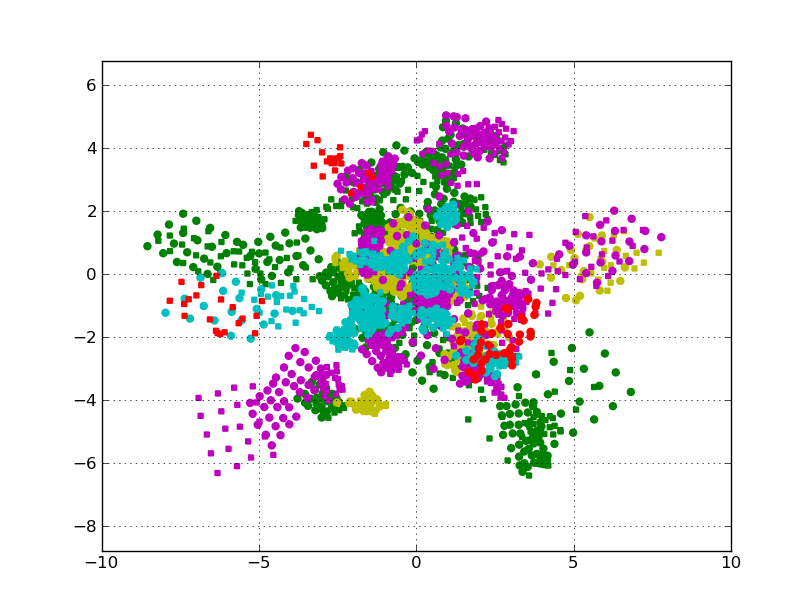
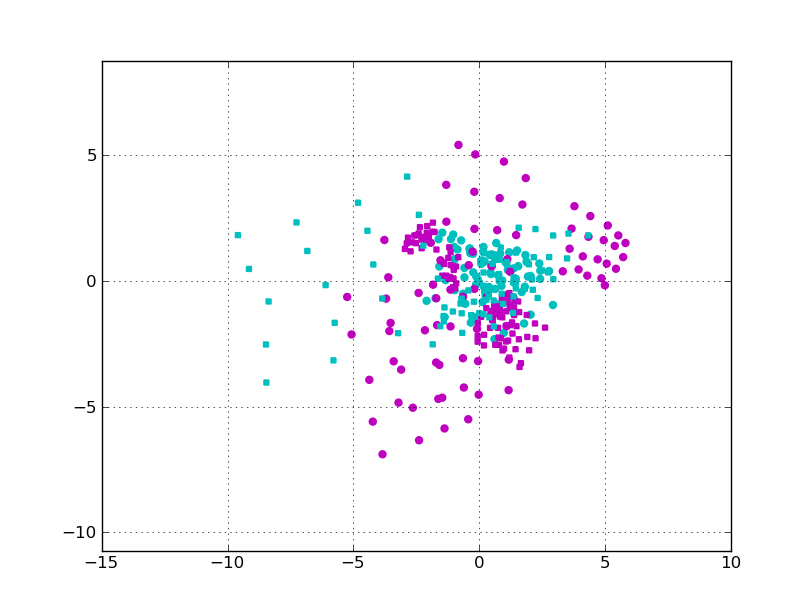
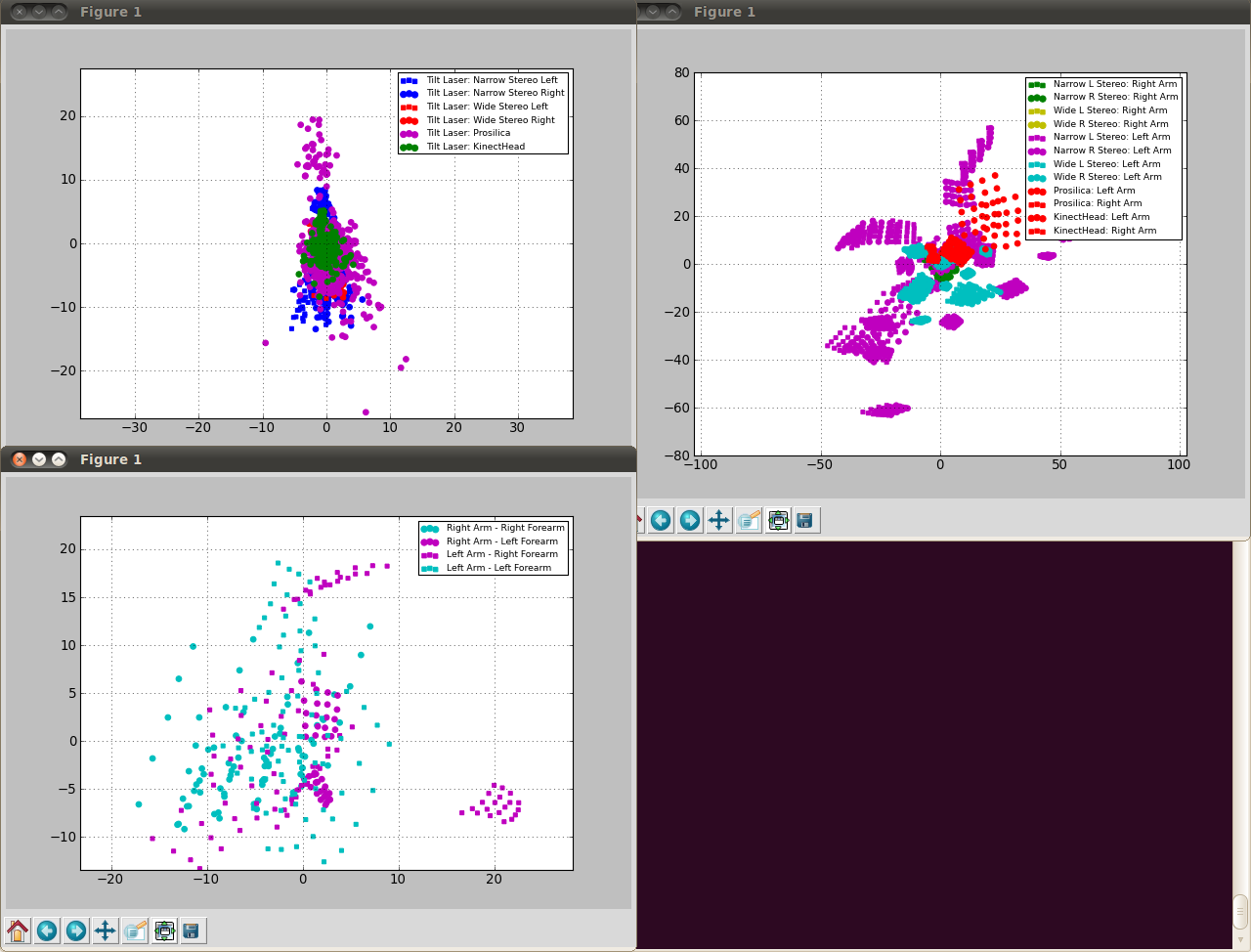
Here are the three graphs I get as a result.
Two part question:
1) How should I interpret these graphs?
2) What can I do to improve the accuracy?
I can upload my cal_measurements.bag if needed. It has 75 robot_measurements in it.
add a comment


{kind=link}