
How to change the frame(fixed/target) of hokuyo node?
I use the launch file
<launch>
<node pkg="hokuyo_node" type="hokuyo_node" name="hokuyo_node">
<remap from="/laser" to="/base_laser" />
</node>
</launch>
I run the command :
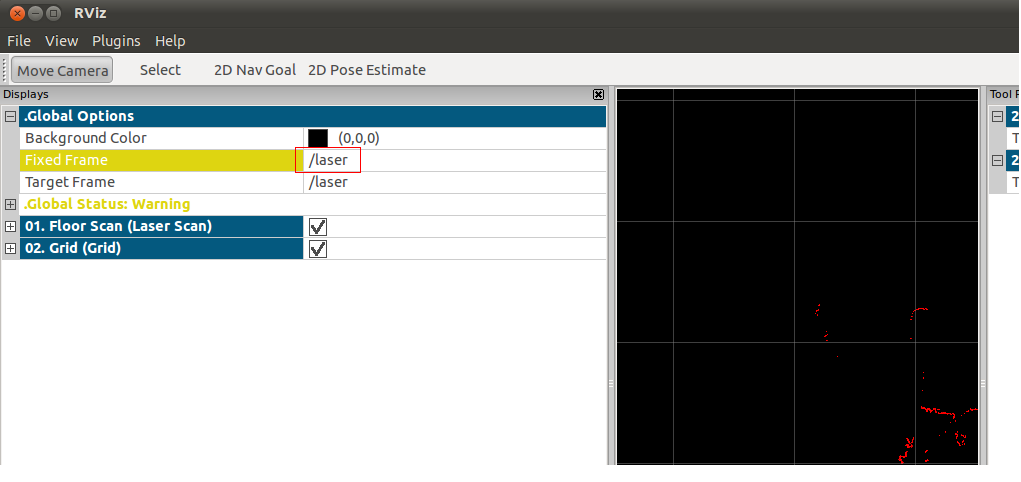
rosrun rviz rviz -d `rospack find hokuyo_node`/hokuyo_test.vcg
It shows the frame /laser not /base_laser.
How to change it when run the launch file? Because in other nodes use the other name.
What difference between fixed and target frame?
Thank you~
add a comment

