
interactive launch
Does ROS have a way to interactively start-stop nodes? For example - taking a bunch of rosnodes and having a start-stop button next to each and showing their output?
add a comment
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
Does ROS have a way to interactively start-stop nodes? For example - taking a bunch of rosnodes and having a start-stop button next to each and showing their output?
Hi Dimitar,
I just started on something called rxlaunch, which does exactly that. It's still in active development, but may already be useful to you.
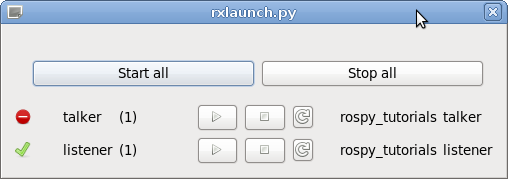
You can get rxlaunch from its kforge page. Just checkout the mercurial repository and run rxlaunch.py. You may also need to install PySide.
Some things that don't work yet (2011-07-14):
roslaunch the launch file first, then use rxlaunchWhen things go wrong, just file a ticket.
I'm making now rqt_launch, a roslaunch GUI based on rqt framework that's introduced since Groovy. http://www.ros.org/wiki/rqt_launch. As of today only source install is possible (from http://goo.gl/pC7Mv) but will soon be available in debian pkg.
No, it does not.
Asked: 2011-07-14 03:44:18 -0500
Seen: 1,064 times
Last updated: Jul 14 '11
Is there any GUI based builder for URDF? [closed]
Invalid roslaunch XML syntax: not well-formed
Sending start command vs starting node.
setting ros parameters via launch files
Remote Roslaunch Output to Local Monitor [closed]
nodelet name appended to topic
Is it possible to launch non ros applications with roslaunch?
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.