
Empty Map after rosrun map_server map_saver
I have installed ROS fuerte on Ubuntu 10.04 and using USARSim simulator on windows 7
64 bit PC. And using UsarsimRos from git clone git://git.assembla.com/usarsim.git
command list
Start-up roscore
rosbag record -O mylaserdata.bag /lms200 /tf
INFO 1383223128.547387984: Subscribing to /lms200
INFO 1383223128.548429961: Subscribing to /tf
INFO 1383223128.549742465: Recording to mylaserdata.bag.
WARN 1383223128.549933629: Less than 5GB of space free on disk with mylaserdata.bag.active
Start-up USARSim on the windows pc environment started in usarsim
Start-up the ROS interface, roslaunch usarsim_inf usarsim.launch(robot placed in environment)
5.Run the tele-op keyboard which should allow you to drive the robot around.:
$ rosrun teleop_twist_keyboard teleop_twist_keyboard.py
6.$ rosrun gmapping slam_gmapping scan:=lms200 _odom_frame:=odom
- rosbag play mylaserdata.bag
successfully completed.
- rosrun map_server map_saver
o/p=MAP GENERATED BUT IT IS EMPTY:)
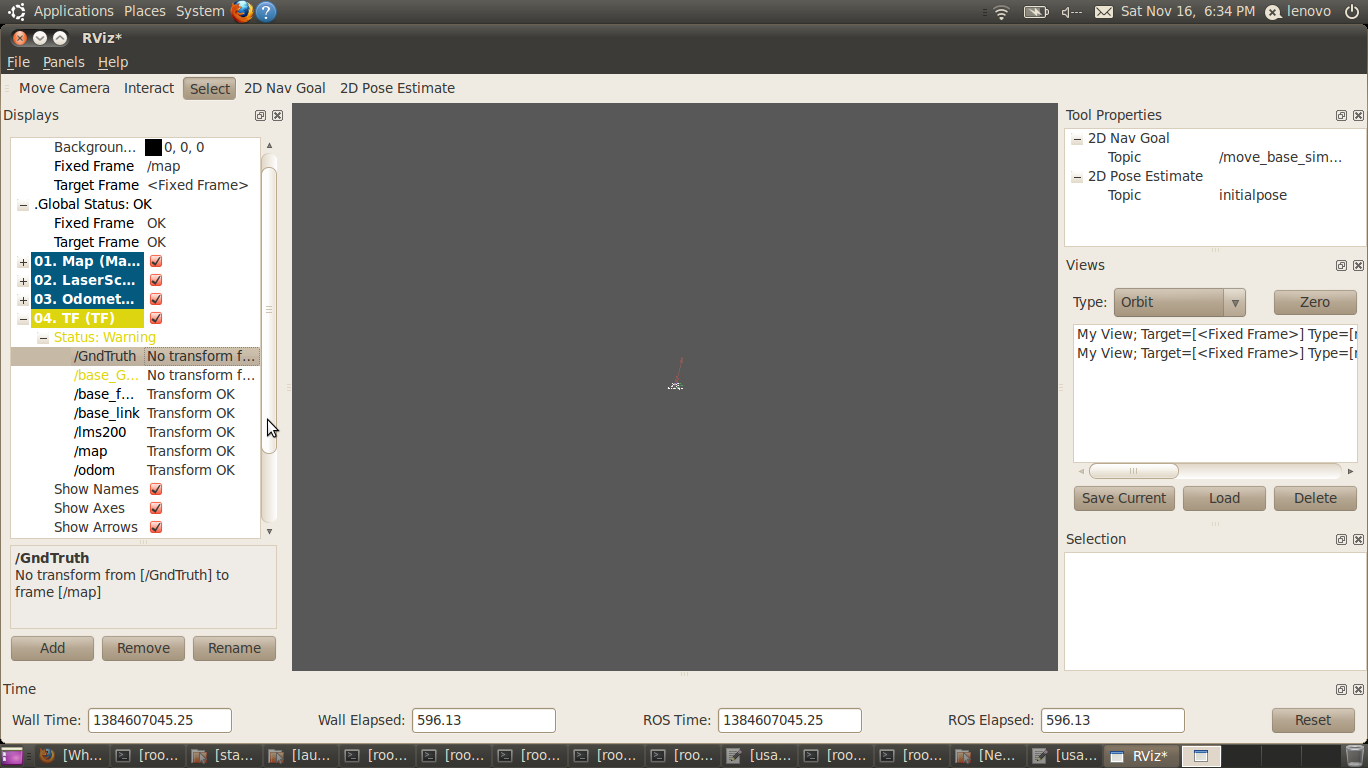
Before map_server utility begin I have captured the screenshots Initial Position rviz
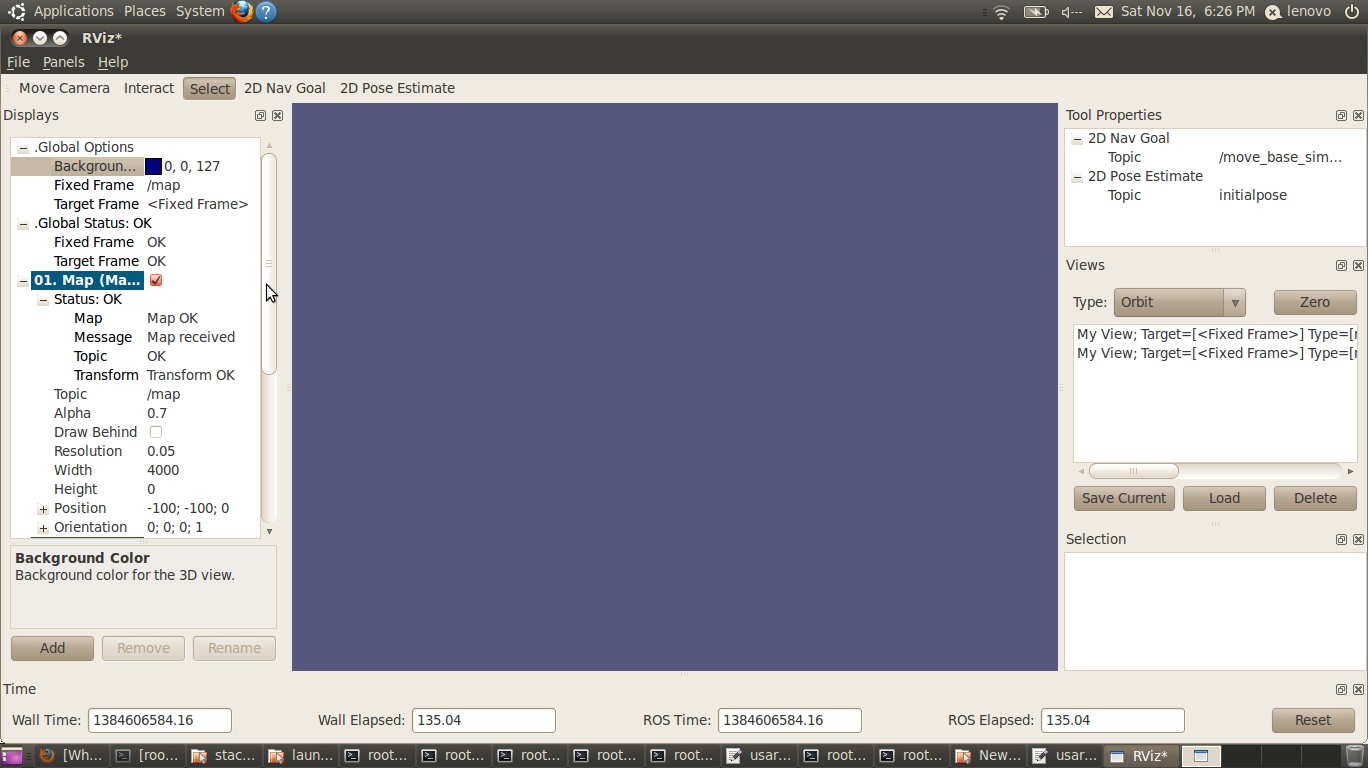
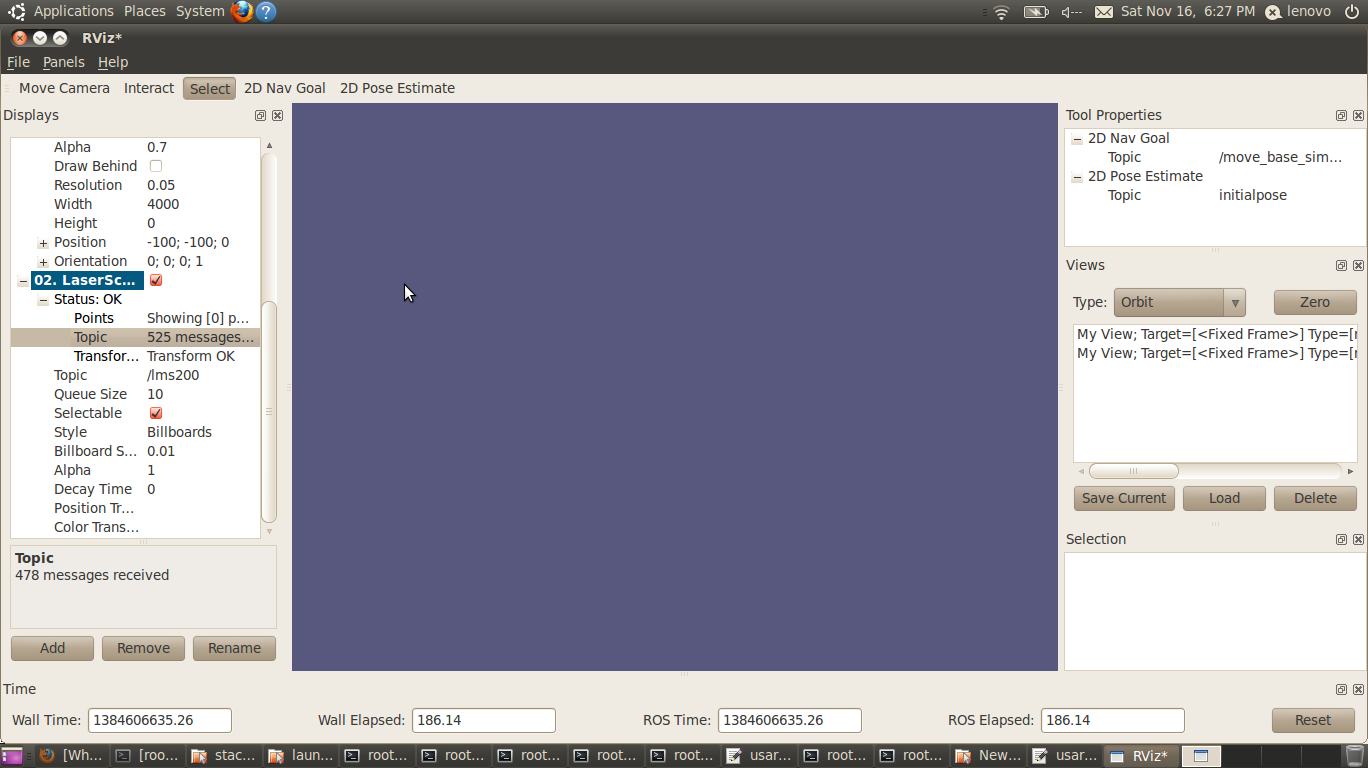
Laser scan is ok
Odometry is wrong initially
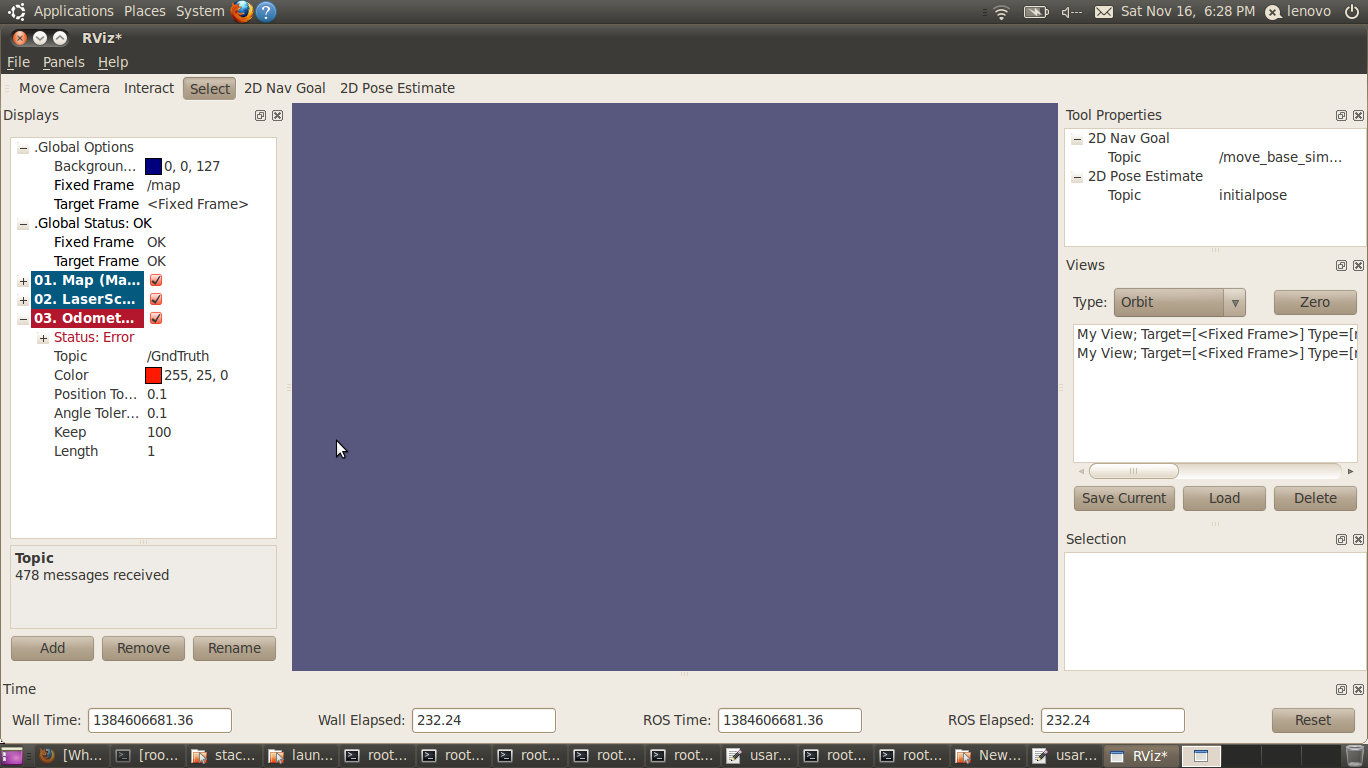
Odometry is corrected as below
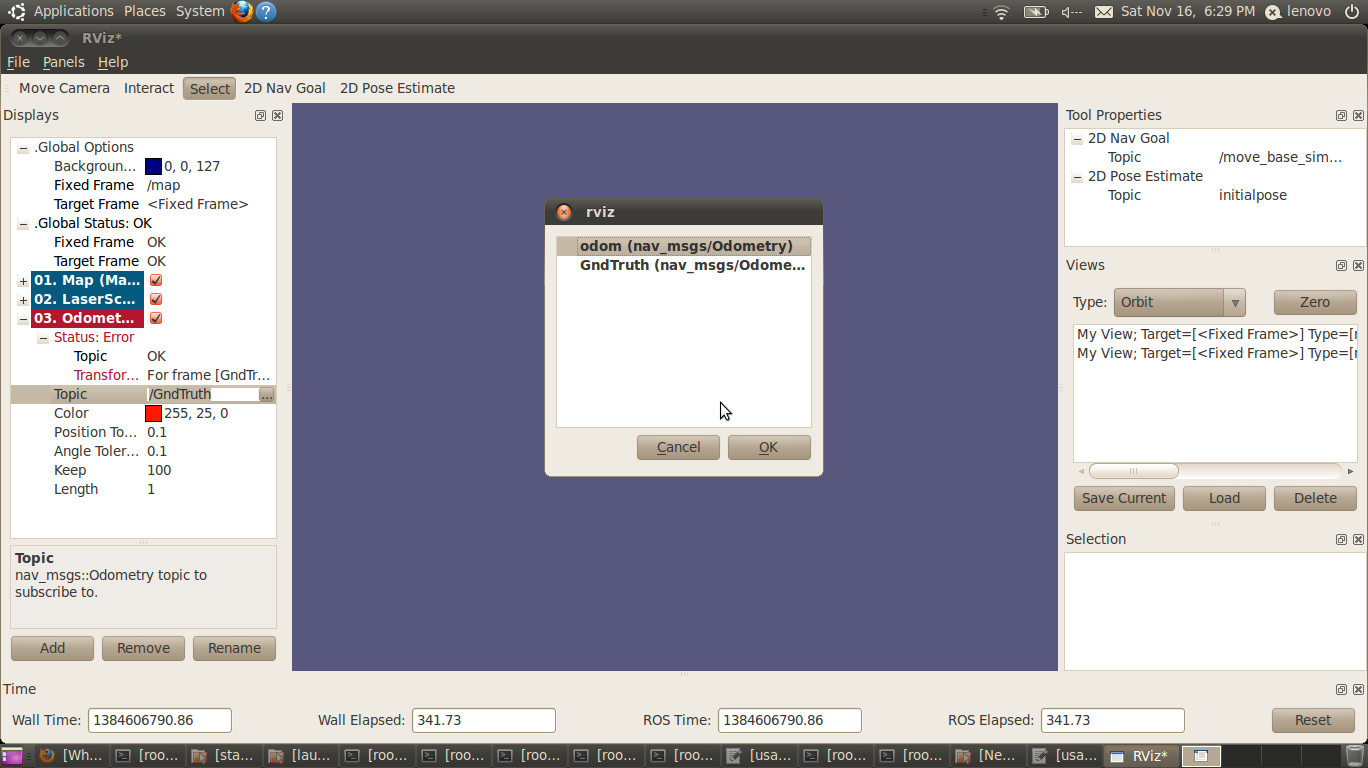
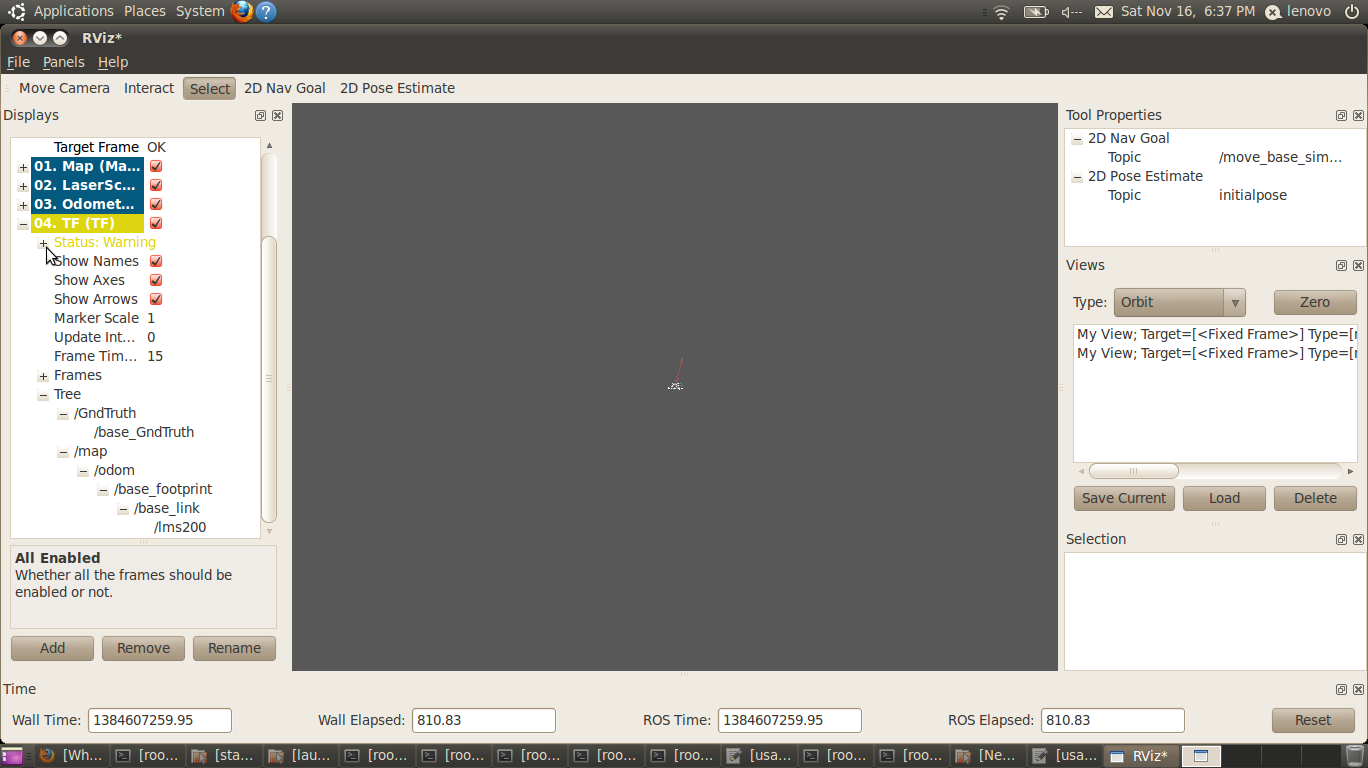
TF status warning no transform from /GndTruth to /map
TF tree
map.yaml file
image: map.pgm
resolution: 0.050000
origin: [-100.000000, -100.000000, 0.000000]
negate: 0
occupied_thresh: 0.65
free_thresh: 0.196
Image size is 15.3 MB
Thanks in advance
