
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
Not sure about the exploration stack, but you could try out the hector_exploration_planner package that we use with great success for exploration while participating in the RoboCup Rescue Robot League. There currently isn't an example available interacting with the navigation stack, but implementing a node that calls the service provided by the hector_exploration_node and feeds the provided goals to move_base should be straightforward.
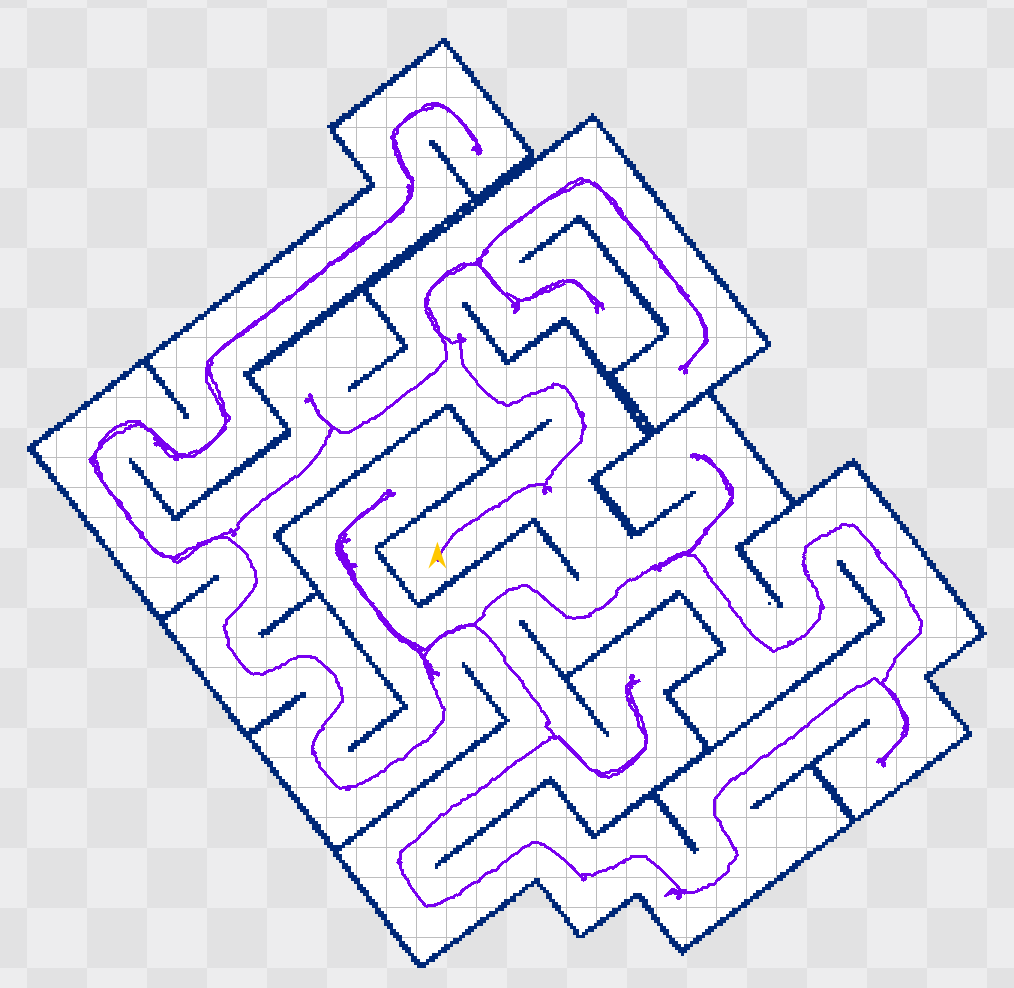
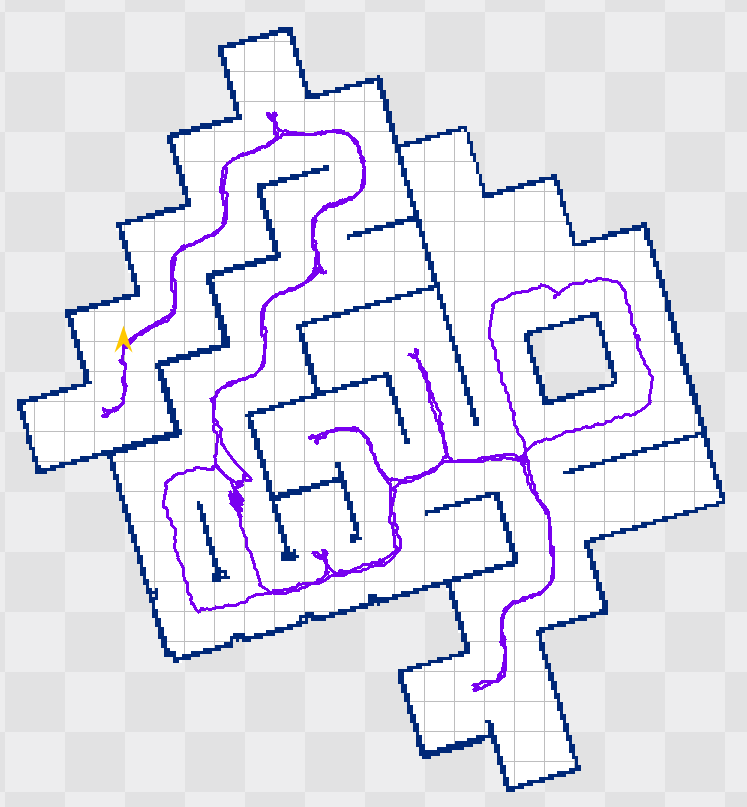
Two examples of exploration in (gazebo) simulation:
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
