
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
To install household objects database server, please refer to this page.
I can give you steps.
To create server
1.Open a terminal, type
sudo apt-get install postgresql
2.After the installation, type the command below to become user postgres
sudo su - postgres
For example, it's like
rosfuerte@rosfuerte-K53SM:~$ sudo su - postgres
[sudo] password for rosfuerte:
postgres@rosfuerte-K53SM:~$
3.Next, type psql to enter postgre sql interpreter, it's like
postgres@rosfuerte-K53SM:~$ psql
psql (9.1.6)
Type "help" for help.
postgres=#
4.Then, add a new user willow by entering CREATE ROLE ...(Don't forget the semicolon)
postgres=# CREATE ROLE willow LOGIN CREATEDB CREATEROLE PASSWORD 'willow';
5.Leave the interpreter
postgres=# \q
postgres@rosfuerte-K53SM:~$
To make connection over TCP/IP works
1.Get the paths of the files(pg_hba.conf & postgresql.conf) you need to modify
postgres@rosfuerte-K53SM:~$ ps auxw | grep postgresql
postgres 1170 0.0 0.1 132084 10400 ? S 09:53 0:00 /usr/lib/postgresql/9.1/bin/postgres -D /var/lib/postgresql/9.1/main -c config_file=/etc/postgresql/9.1/main/postgresql.conf
postgres 4095 0.0 0.0 13612 916 pts/1 S+ 11:32 0:00 grep postgresql
2.Modify pg_hba.conf(usually is /etc/postgresql/9.1/main/pg_hba.conf), You need to add these two lines in the bottom of this file
# Anybody through TCP/IP with password
host all all 0.0.0.0 0.0.0.0 md5
3.Modify postgresql.conf(usually is /etc/postgresql/9.1/main/postgresql.conf), add this line to the file
listen_addresses = '*'
To add object database to server
1.Install PGAdmin3
sudo apt-get install pgadmin3
2.Launch PGAdmin3 by enter
pgadmin3
3.Press the plugin button on the upper-left of PGAdmin GUI
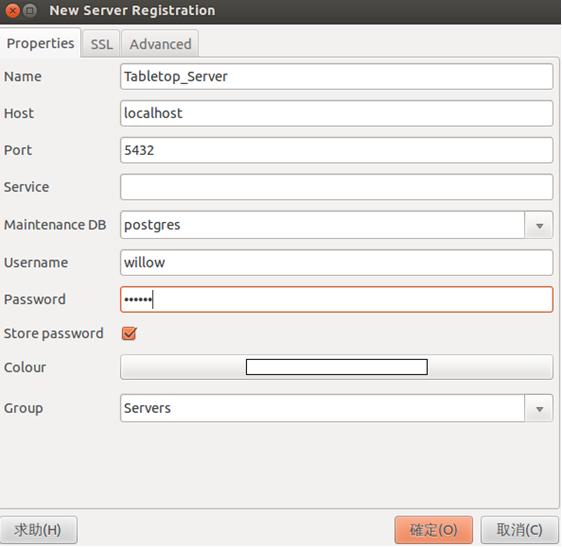
4.Enter the name(whatever name you want)
5.Set the host, enter "localhost"
6.Enter password, which is "willow"
7.When your GUI looks like this, press OK
8.Now you can see your server on Object Browser on the left, press right button of the mouse on "Databases" under the server
9.Choose "New Database..."
10.Set the name and the owner, like(you should follow the name in the picture below)
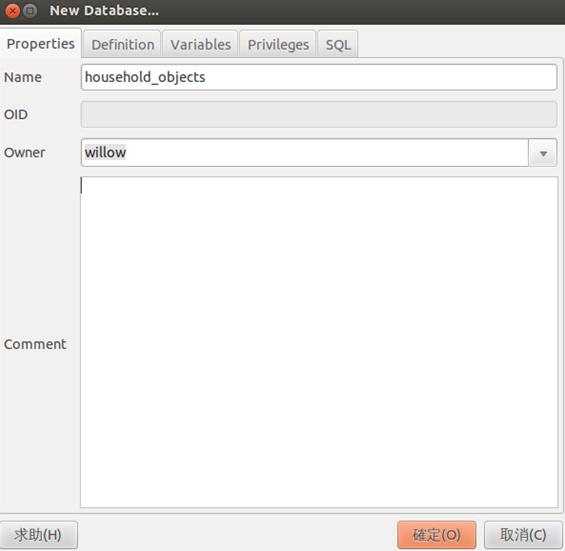
11.Press right button of the mouse on the newly added database
12.Press "Restore..."
13.Download the database backup file by
svn export https://code.ros.org/svn/data/trunk/household_objects/household_objects-0.6_fuerte_prerelease_1.backup
14.Restore the file
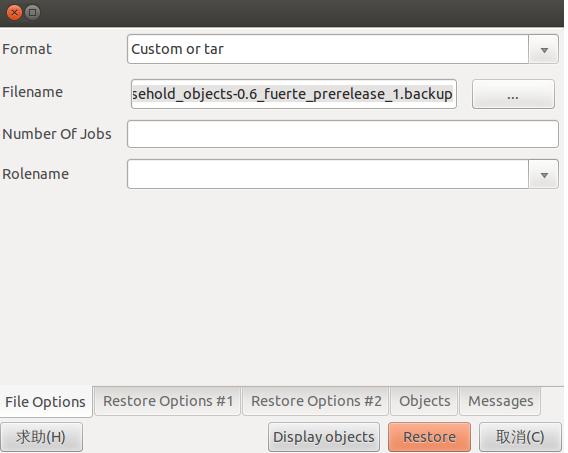
15.Press "Restore", then you finished installing the household objects database
To use this database, you first need to create a yaml file, for example, I should create my_server.yaml
household_objects_database:
database_host: localhost
database_port: 5432
database_user: willow
database_pass: willow
database_name: household_objects
To integrate the database with tabletop object detector, you should create a launch file(in this example, I created a package named ricky_tabletop_object_detector, I put my_server.yaml in ricky_tabletop_object_detector/yaml/, and put this launch file in ricky_tabletop_object_detector/launch/)
<launch>
<!-- set stereo to true for narrow stereo, false for kinect -->
<arg name="stereo" default="true" />
<arg name="use_slip_controllers" default="false"/>
<arg name="use_right_arm" default="true"/>
<arg name="use_left_arm" default="true"/>
<arg name="use_task_cartesian" default="false"/>
<arg name="log_to_warehouse" default="false"/>
<arg name="flatten_table" default="false"/>
<arg name="kinect_frame_prefix" default="/head_mount_kinect" />
<arg name="kinect_camera_name" default="head_mount_kinect" />
<arg name="sim" default="false"/>
<!-- client for object database running on remote server at Willow Garage -->
<!-- DOES NOT WORK IN TRUNK RIGHT NOW -->
<!--
<include file="$(find household_objects_database)/launch/objects_database_remote_client.launch"/>
-->
<!-- alternative option: database server running on a local machine -->
<rosparam command="load" file="$(find ricky_tabletop_object_detector)/yaml/my_server.yaml"/>
<node pkg="household_objects_database" name="objects_database_node" type="objects_database_node"
respawn="true" output="screen"/>
<!-- manipulation prerequisites -->
<include file="$(find pr2_object_manipulation_launch)/launch/pr2_manipulation_prerequisites.launch">
<arg name="stereo" value="$(arg stereo)"/>
<arg name="use_left_arm" value="$(arg use_left_arm)"/>
<arg name="use_right_arm" value="$(arg use_right_arm)"/>
<arg name="log_to_warehouse" value="$(arg log_to_warehouse)"/>
<arg name="kinect_frame_prefix" value="$(arg kinect_frame_prefix)"/>
<arg name="sim" value="$(arg sim)"/>
</include>
<!-- manipulation -->
<include file="$(find pr2_object_manipulation_launch)/launch/pr2_manipulation.launch">
<arg name="use_slip_controllers" value="$(arg use_slip_controllers)"/>
<arg name="use_left_arm" value="$(arg use_left_arm)"/>
<arg name="use_right_arm" value="$(arg use_right_arm)"/>
<arg name="use_task_cartesian" value="$(arg use_task_cartesian)"/>
<arg name="sim" value="$(arg sim)"/>
</include>
<!-- tabletop collision map processing -->
<node pkg="tabletop_collision_map_processing" name="tabletop_collision_map_processing"
type="tabletop_collision_map_processing_node" respawn="false" output="screen"/>
<param name="tabletop_collision_map_processing/get_model_mesh_srv"
value="/objects_database_node/get_model_mesh" />
<param name="tabletop_collision_map_processing/static_map_cloud_name" value="full_cloud_filtered" />
<!-- tabletop segmentation and object recognition -->
<include file="$(find tabletop_object_detector)/launch/tabletop_complete.launch">
<arg unless="$(arg stereo)" name="tabletop_segmentation_points_input" value="$(arg kinect_camera_name)/depth_registered/points"/>
<arg if="$(arg stereo)" name="tabletop_segmentation_points_input" value="narrow_stereo_textured/points2"/>
<arg name="flatten_table" value="$(arg flatten_table)"/>
</include>
</launch>
| | 2 | No.2 Revision |
Household objects database is used by Tabletop object recognition.
To install household objects database server, please you can refer to this page.
. But I can give you steps.
To create server
1.Open a terminal, type
sudo apt-get install postgresql
2.After the installation, type the command below to become user postgres
sudo su - postgres
For example, it's like
rosfuerte@rosfuerte-K53SM:~$ sudo su - postgres
[sudo] password for rosfuerte:
postgres@rosfuerte-K53SM:~$
3.Next, type psql to enter postgre sql interpreter, it's like
postgres@rosfuerte-K53SM:~$ psql
psql (9.1.6)
Type "help" for help.
postgres=#
4.Then, add a new user willow by entering CREATE ROLE ...(Don't forget the semicolon)
postgres=# CREATE ROLE willow LOGIN CREATEDB CREATEROLE PASSWORD 'willow';
5.Leave the interpreter
postgres=# \q
postgres@rosfuerte-K53SM:~$
To make connection over TCP/IP works
1.Get the paths of the files(pg_hba.conf & postgresql.conf) you need to modify
postgres@rosfuerte-K53SM:~$ ps auxw | grep postgresql
postgres 1170 0.0 0.1 132084 10400 ? S 09:53 0:00 /usr/lib/postgresql/9.1/bin/postgres -D /var/lib/postgresql/9.1/main -c config_file=/etc/postgresql/9.1/main/postgresql.conf
postgres 4095 0.0 0.0 13612 916 pts/1 S+ 11:32 0:00 grep postgresql
2.Modify pg_hba.conf(usually is /etc/postgresql/9.1/main/pg_hba.conf), You need to add these two lines in the bottom of this file
# Anybody through TCP/IP with password
host all all 0.0.0.0 0.0.0.0 md5
3.Modify postgresql.conf(usually is /etc/postgresql/9.1/main/postgresql.conf), add this line to the file
listen_addresses = '*'
To add object database to server
1.Install PGAdmin3
sudo apt-get install pgadmin3
2.Launch PGAdmin3 by enter
pgadmin3
3.Press the plugin button on the upper-left of PGAdmin GUI
4.Enter the name(whatever name you want)
5.Set the host, enter "localhost"
6.Enter password, which is "willow"
7.When your GUI looks like this, press OK
8.Now you can see your server on Object Browser on the left, press right button of the mouse on "Databases" under the server
9.Choose "New Database..."
10.Set the name and the owner, like(you should follow the name in the picture below)
11.Press right button of the mouse on the newly added database
12.Press "Restore..."
13.Download the database backup file by
svn export https://code.ros.org/svn/data/trunk/household_objects/household_objects-0.6_fuerte_prerelease_1.backup
14.Restore the file
15.Press "Restore", then you finished installing the household objects database
To use this database, you first need to create a yaml file, for example, I should create my_server.yaml
household_objects_database:
database_host: localhost
database_port: 5432
database_user: willow
database_pass: willow
database_name: household_objects
To integrate the database with tabletop object detector, you should create a launch file(in this example, I created a package named ricky_tabletop_object_detector, I put my_server.yaml in ricky_tabletop_object_detector/yaml/, and put this launch file in ricky_tabletop_object_detector/launch/)
<launch>
<!-- set stereo to true for narrow stereo, false for kinect -->
<arg name="stereo" default="true" />
<arg name="use_slip_controllers" default="false"/>
<arg name="use_right_arm" default="true"/>
<arg name="use_left_arm" default="true"/>
<arg name="use_task_cartesian" default="false"/>
<arg name="log_to_warehouse" default="false"/>
<arg name="flatten_table" default="false"/>
<arg name="kinect_frame_prefix" default="/head_mount_kinect" />
<arg name="kinect_camera_name" default="head_mount_kinect" />
<arg name="sim" default="false"/>
<!-- client for object database running on remote server at Willow Garage -->
<!-- DOES NOT WORK IN TRUNK RIGHT NOW -->
<!--
<include file="$(find household_objects_database)/launch/objects_database_remote_client.launch"/>
-->
<!-- alternative option: database server running on a local machine -->
<rosparam command="load" file="$(find ricky_tabletop_object_detector)/yaml/my_server.yaml"/>
<node pkg="household_objects_database" name="objects_database_node" type="objects_database_node"
respawn="true" output="screen"/>
<!-- manipulation prerequisites -->
<include file="$(find pr2_object_manipulation_launch)/launch/pr2_manipulation_prerequisites.launch">
<arg name="stereo" value="$(arg stereo)"/>
<arg name="use_left_arm" value="$(arg use_left_arm)"/>
<arg name="use_right_arm" value="$(arg use_right_arm)"/>
<arg name="log_to_warehouse" value="$(arg log_to_warehouse)"/>
<arg name="kinect_frame_prefix" value="$(arg kinect_frame_prefix)"/>
<arg name="sim" value="$(arg sim)"/>
</include>
<!-- manipulation -->
<include file="$(find pr2_object_manipulation_launch)/launch/pr2_manipulation.launch">
<arg name="use_slip_controllers" value="$(arg use_slip_controllers)"/>
<arg name="use_left_arm" value="$(arg use_left_arm)"/>
<arg name="use_right_arm" value="$(arg use_right_arm)"/>
<arg name="use_task_cartesian" value="$(arg use_task_cartesian)"/>
<arg name="sim" value="$(arg sim)"/>
</include>
<!-- tabletop collision map processing -->
<node pkg="tabletop_collision_map_processing" name="tabletop_collision_map_processing"
type="tabletop_collision_map_processing_node" respawn="false" output="screen"/>
<param name="tabletop_collision_map_processing/get_model_mesh_srv"
value="/objects_database_node/get_model_mesh" />
<param name="tabletop_collision_map_processing/static_map_cloud_name" value="full_cloud_filtered" />
<!-- tabletop segmentation and object recognition -->
<include file="$(find tabletop_object_detector)/launch/tabletop_complete.launch">
<arg unless="$(arg stereo)" name="tabletop_segmentation_points_input" value="$(arg kinect_camera_name)/depth_registered/points"/>
<arg if="$(arg stereo)" name="tabletop_segmentation_points_input" value="narrow_stereo_textured/points2"/>
<arg name="flatten_table" value="$(arg flatten_table)"/>
</include>
</launch>
| | 3 | No.3 Revision |
Household objects database is used by Tabletop object recognition.
To install household objects database server, you can refer to this page. But I can give you steps.
To create server
1.Open a terminal, type
sudo apt-get install postgresql
2.After the installation, type the command below to become user postgres
sudo su - postgres
For example, it's like
rosfuerte@rosfuerte-K53SM:~$ sudo su - postgres
[sudo] password for rosfuerte:
postgres@rosfuerte-K53SM:~$
3.Next, type psql to enter postgre sql interpreter, it's like
postgres@rosfuerte-K53SM:~$ psql
psql (9.1.6)
Type "help" for help.
postgres=#
4.Then, add a new user willow by entering CREATE ROLE ...(Don't forget the semicolon)
postgres=# CREATE ROLE willow LOGIN CREATEDB CREATEROLE PASSWORD 'willow';
5.Leave the interpreter
postgres=# \q
postgres@rosfuerte-K53SM:~$
To make connection over TCP/IP works
1.Get the paths of the files(pg_hba.conf & postgresql.conf) you need to modify
postgres@rosfuerte-K53SM:~$ ps auxw | grep postgresql
postgres 1170 0.0 0.1 132084 10400 ? S 09:53 0:00 /usr/lib/postgresql/9.1/bin/postgres -D /var/lib/postgresql/9.1/main -c config_file=/etc/postgresql/9.1/main/postgresql.conf
postgres 4095 0.0 0.0 13612 916 pts/1 S+ 11:32 0:00 grep postgresql
2.Modify pg_hba.conf(usually is /etc/postgresql/9.1/main/pg_hba.conf), You need to add these two lines in the bottom of this file
# Anybody through TCP/IP with password
host all all 0.0.0.0 0.0.0.0 md5
3.Modify postgresql.conf(usually is /etc/postgresql/9.1/main/postgresql.conf), add this line to the file
listen_addresses = '*'
4.Log out postgres user
exit
5.Reboot your computer
To add object database to server
1.Install PGAdmin3
sudo apt-get install pgadmin3
2.Launch PGAdmin3 by enter
pgadmin3
3.Press the plugin button on the upper-left of PGAdmin GUI
4.Enter the name(whatever name you want)
5.Set the host, enter "localhost"
6.Enter password, which is "willow"
7.When your GUI looks like this, press OK
8.Now you can see your server on Object Browser on the left, press right button of the mouse on "Databases" under the server
9.Choose "New Database..."
10.Set the name and the owner, like(you should follow the name in the picture below)
11.Press right button of the mouse on the newly added database
12.Press "Restore..."
13.Download the database backup file by
svn export https://code.ros.org/svn/data/trunk/household_objects/household_objects-0.6_fuerte_prerelease_1.backup
14.Restore the file
15.Press "Restore", "Restore"(Restore process need some time to complete), then you finished installing the household objects database
To use this database, you first need to create a yaml file, for example, I should create my_server.yaml
household_objects_database:
database_host: localhost
database_port: 5432
database_user: willow
database_pass: willow
database_name: household_objects
To integrate the database with tabletop object detector, you should create a launch file(in this example, I created a package named ricky_tabletop_object_detector, I put my_server.yaml in ricky_tabletop_object_detector/yaml/, and put this launch file in ricky_tabletop_object_detector/launch/)
<launch>
<!-- set stereo to true for narrow stereo, false for kinect -->
<arg name="stereo" default="true" />
<arg name="use_slip_controllers" default="false"/>
<arg name="use_right_arm" default="true"/>
<arg name="use_left_arm" default="true"/>
<arg name="use_task_cartesian" default="false"/>
<arg name="log_to_warehouse" default="false"/>
<arg name="flatten_table" default="false"/>
<arg name="kinect_frame_prefix" default="/head_mount_kinect" />
<arg name="kinect_camera_name" default="head_mount_kinect" />
<arg name="sim" default="false"/>
<!-- client for object database running on remote server at Willow Garage -->
<!-- DOES NOT WORK IN TRUNK RIGHT NOW -->
<!--
<include file="$(find household_objects_database)/launch/objects_database_remote_client.launch"/>
-->
<!-- alternative option: database server running on a local machine -->
<rosparam command="load" file="$(find ricky_tabletop_object_detector)/yaml/my_server.yaml"/>
<node pkg="household_objects_database" name="objects_database_node" type="objects_database_node"
respawn="true" output="screen"/>
<!-- manipulation prerequisites -->
<include file="$(find pr2_object_manipulation_launch)/launch/pr2_manipulation_prerequisites.launch">
<arg name="stereo" value="$(arg stereo)"/>
<arg name="use_left_arm" value="$(arg use_left_arm)"/>
<arg name="use_right_arm" value="$(arg use_right_arm)"/>
<arg name="log_to_warehouse" value="$(arg log_to_warehouse)"/>
<arg name="kinect_frame_prefix" value="$(arg kinect_frame_prefix)"/>
<arg name="sim" value="$(arg sim)"/>
</include>
<!-- manipulation -->
<include file="$(find pr2_object_manipulation_launch)/launch/pr2_manipulation.launch">
<arg name="use_slip_controllers" value="$(arg use_slip_controllers)"/>
<arg name="use_left_arm" value="$(arg use_left_arm)"/>
<arg name="use_right_arm" value="$(arg use_right_arm)"/>
<arg name="use_task_cartesian" value="$(arg use_task_cartesian)"/>
<arg name="sim" value="$(arg sim)"/>
</include>
<!-- tabletop collision map processing -->
<node pkg="tabletop_collision_map_processing" name="tabletop_collision_map_processing"
type="tabletop_collision_map_processing_node" respawn="false" output="screen"/>
<param name="tabletop_collision_map_processing/get_model_mesh_srv"
value="/objects_database_node/get_model_mesh" />
<param name="tabletop_collision_map_processing/static_map_cloud_name" value="full_cloud_filtered" />
<!-- tabletop segmentation and object recognition -->
<include file="$(find tabletop_object_detector)/launch/tabletop_complete.launch">
<arg unless="$(arg stereo)" name="tabletop_segmentation_points_input" value="$(arg kinect_camera_name)/depth_registered/points"/>
<arg if="$(arg stereo)" name="tabletop_segmentation_points_input" value="narrow_stereo_textured/points2"/>
<arg name="flatten_table" value="$(arg flatten_table)"/>
</include>
</launch>
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
