
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
I started looking at just the R2 upper body because I had this working with the arm_navigation some months ago, but have been running into similar issues as I have been with the legs.
Just to minimize the chances of collisions, I reduced all the collision models in the entire robot to about 80%, and unchecked all pairs in the advanced mode of the arm nav wizard.
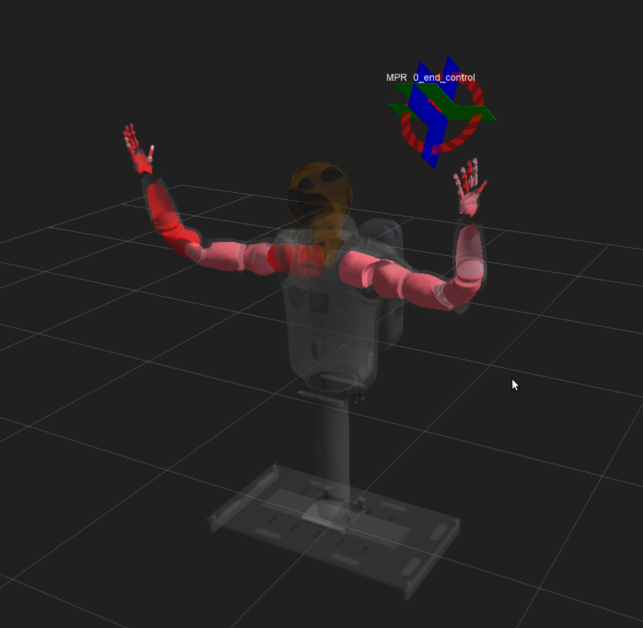
Tabling for now the fact that if i chose more than one kinematic chain, the warehouse viewer wouldn't start properly for me, I'm still getting collisions for all possible movements. The following picture shows what happens as soon as I move the marker (with the robot visualization at a lower alpha). You can see the smaller collision models, none of which are in contact with each other, show up immediately as red (i.e. in collision). This is true for both arms, even when the (only) kinematic chain I have built the models for are between the chest and the left index finger base!
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.