
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
Solution to the ".py script not found" error:
cd /opt/ros/fuerte/stacks/camera_pose/camera_pose_calibration/src/camera_pose_calibration
sudo mv robomeasurement_cache.py robomeasurement_cache.py.org
sudo cp /opt/ros/fuerte/stacks/calibration/calibration_launch/src/capture_executive/robomeasurement_cache.py .
By the way, I'm still not able to have something published to /tf.
| | 2 | No.2 Revision |
Solution to the ".py script not found" error:
cd /opt/ros/fuerte/stacks/camera_pose/camera_pose_calibration/src/camera_pose_calibration
sudo mv robomeasurement_cache.py robomeasurement_cache.py.org
robot_measurement_cache.py.org
sudo cp /opt/ros/fuerte/stacks/calibration/calibration_launch/src/capture_executive/robomeasurement_cache.py /opt/ros/fuerte/stacks/calibration/calibration_launch/src/capture_executive/robot_measurement_cache.py .
By the way, I'm still not able to have something published to /tf.
| | 3 | No.3 Revision |
Solution to the ".py script not found" error:
cd /opt/ros/fuerte/stacks/camera_pose/camera_pose_calibration/src/camera_pose_calibration
sudo mv robomeasurement_cache.py robot_measurement_cache.py.org
sudo cp /opt/ros/fuerte/stacks/calibration/calibration_launch/src/capture_executive/robot_measurement_cache.py .
By the way, I'm still not able to have something published to /tf.
EDIT: I'll describe the workflow and the final problem of camera_pose_calibration.
launch file for cameras
<launch>
<group ns="baseline12">
<node name="stereo_image_proc_bsl12" pkg="stereo_image_proc" type="stereo_image_proc"></node>
<node name="uvc_camera_bsl12" pkg="uvc_camera" type="stereo_node">
<param name="left/device" value="/dev/video1" />
<param name="right/device" value="/dev/video2" />
<param name="fps" value="15" />
<param name="skip_frames" value="1" />
<param name="width" value="640" />
<param name="height" value="480" />
<param name="frame_id" value="baseline12" />
</node>
<include file="$(find camera_pose_calibration)/blocks/calibration_tf_publisher.launch">
<arg name="cache_file" value="/tmp/camera_pose_calibration_cache.bag" />
</include>
</group>
</launch>
command line for camera_pose_calibration
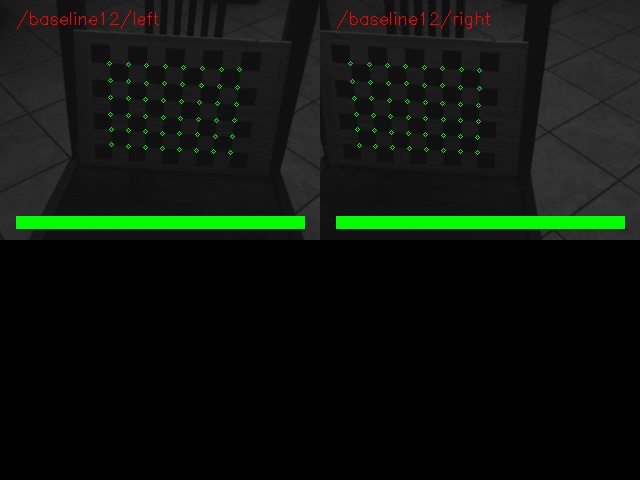
roslaunch camera_pose_calibration calibrate_2_camera.launch camera1_ns:=/baseline12/left camera2_ns:=/baseline12/right checker_rows:=6 checker_cols:=8 checker_size:=0.028
Then I can see the /aggregated_image and the checkerboard corners are correctly identified. The problem is that I can't go on after this point.
You can see the screenshot:
rostopic list output
fabio@faramir:~$ rostopic list
/aggregated_image
/baseline12/camera_calibration
/baseline12/disparity
/baseline12/left/camera_info
/baseline12/left/cb_detector_config/cancel
/baseline12/left/cb_detector_config/feedback
/baseline12/left/cb_detector_config/goal
/baseline12/left/cb_detector_config/result
/baseline12/left/cb_detector_config/status
/baseline12/left/features
/baseline12/left/image_color
/baseline12/left/image_color/compressed
/baseline12/left/image_color/compressed/parameter_descriptions
/baseline12/left/image_color/compressed/parameter_updates
/baseline12/left/image_color/theora
/baseline12/left/image_color/theora/parameter_descriptions
/baseline12/left/image_color/theora/parameter_updates
/baseline12/left/image_mono
/baseline12/left/image_mono/compressed
/baseline12/left/image_mono/compressed/parameter_descriptions
/baseline12/left/image_mono/compressed/parameter_updates
/baseline12/left/image_mono/theora
/baseline12/left/image_mono/theora/parameter_descriptions
/baseline12/left/image_mono/theora/parameter_updates
/baseline12/left/image_raw
/baseline12/left/image_raw/compressed
/baseline12/left/image_raw/compressed/parameter_descriptions
/baseline12/left/image_raw/compressed/parameter_updates
/baseline12/left/image_raw/theora
/baseline12/left/image_raw/theora/parameter_descriptions
/baseline12/left/image_raw/theora/parameter_updates
/baseline12/left/image_rect
/baseline12/left/image_rect/compressed
/baseline12/left/image_rect/compressed/parameter_descriptions
/baseline12/left/image_rect/compressed/parameter_updates
/baseline12/left/image_rect/theora
/baseline12/left/image_rect/theora/parameter_descriptions
/baseline12/left/image_rect/theora/parameter_updates
/baseline12/left/image_rect_color
/baseline12/left/image_rect_color/compressed
/baseline12/left/image_rect_color/compressed/parameter_descriptions
/baseline12/left/image_rect_color/compressed/parameter_updates
/baseline12/left/image_rect_color/theora
/baseline12/left/image_rect_color/theora/parameter_descriptions
/baseline12/left/image_rect_color/theora/parameter_updates
/baseline12/left/image_throttle
/baseline12/left/monocam_settler_config/cancel
/baseline12/left/monocam_settler_config/feedback
/baseline12/left/monocam_settler_config/goal
/baseline12/left/monocam_settler_config/result
/baseline12/left/monocam_settler_config/status
/baseline12/left/settled_interval
/baseline12/points
/baseline12/points2
/baseline12/right/camera_info
/baseline12/right/cb_detector_config/cancel
/baseline12/right/cb_detector_config/feedback
/baseline12/right/cb_detector_config/goal
/baseline12/right/cb_detector_config/result
/baseline12/right/cb_detector_config/status
/baseline12/right/features
/baseline12/right/image_color
/baseline12/right/image_color/compressed
/baseline12/right/image_color/compressed/parameter_descriptions
/baseline12/right/image_color/compressed/parameter_updates
/baseline12/right/image_color/theora
/baseline12/right/image_color/theora/parameter_descriptions
/baseline12/right/image_color/theora/parameter_updates
/baseline12/right/image_mono
/baseline12/right/image_mono/compressed
/baseline12/right/image_mono/compressed/parameter_descriptions
/baseline12/right/image_mono/compressed/parameter_updates
/baseline12/right/image_mono/theora
/baseline12/right/image_mono/theora/parameter_descriptions
/baseline12/right/image_mono/theora/parameter_updates
/baseline12/right/image_raw
/baseline12/right/image_raw/compressed
/baseline12/right/image_raw/compressed/parameter_descriptions
/baseline12/right/image_raw/compressed/parameter_updates
/baseline12/right/image_raw/theora
/baseline12/right/image_raw/theora/parameter_descriptions
/baseline12/right/image_raw/theora/parameter_updates
/baseline12/right/image_rect
/baseline12/right/image_rect/compressed
/baseline12/right/image_rect/compressed/parameter_descriptions
/baseline12/right/image_rect/compressed/parameter_updates
/baseline12/right/image_rect/theora
/baseline12/right/image_rect/theora/parameter_descriptions
/baseline12/right/image_rect/theora/parameter_updates
/baseline12/right/image_rect_color
/baseline12/right/image_rect_color/compressed
/baseline12/right/image_rect_color/compressed/parameter_descriptions
/baseline12/right/image_rect_color/compressed/parameter_updates
/baseline12/right/image_rect_color/theora
/baseline12/right/image_rect_color/theora/parameter_descriptions
/baseline12/right/image_rect_color/theora/parameter_updates
/baseline12/right/image_throttle
/baseline12/right/monocam_settler_config/cancel
/baseline12/right/monocam_settler_config/feedback
/baseline12/right/monocam_settler_config/goal
/baseline12/right/monocam_settler_config/result
/baseline12/right/monocam_settler_config/status
/baseline12/right/settled_interval
/baseline12/stereo_image_proc_bsl12/parameter_descriptions
/baseline12/stereo_image_proc_bsl12/parameter_updates
/baseline12/stereo_image_proc_bsl12_debayer_left/parameter_descriptions
/baseline12/stereo_image_proc_bsl12_debayer_left/parameter_updates
/baseline12/stereo_image_proc_bsl12_debayer_right/parameter_descriptions
/baseline12/stereo_image_proc_bsl12_debayer_right/parameter_updates
/baseline12/stereo_image_proc_bsl12_rectify_color_left/parameter_descriptions
/baseline12/stereo_image_proc_bsl12_rectify_color_left/parameter_updates
/baseline12/stereo_image_proc_bsl12_rectify_color_right/parameter_descriptions
/baseline12/stereo_image_proc_bsl12_rectify_color_right/parameter_updates
/baseline12/stereo_image_proc_bsl12_rectify_mono_left/parameter_descriptions
/baseline12/stereo_image_proc_bsl12_rectify_mono_left/parameter_updates
/baseline12/stereo_image_proc_bsl12_rectify_mono_right/parameter_descriptions
/baseline12/stereo_image_proc_bsl12_rectify_mono_right/parameter_updates
/baseline12/tf2_buffer_server/cancel
/baseline12/tf2_buffer_server/feedback
/baseline12/tf2_buffer_server/goal
/baseline12/tf2_buffer_server/result
/baseline12/tf2_buffer_server/status
/camera_calibration
/clock
/intersected_interval
/interval
/interval_filtered
/interval_intersection_config/cancel
/interval_intersection_config/feedback
/interval_intersection_config/goal
/interval_intersection_config/result
/interval_intersection_config/status
/reset
/robot_measurement
/rosout
/rosout_agg
/tf
/tf_static
Any ideas? Why camera_pose_calibration can't detect the ckeckerboard and go on publishing data to tf?
Solution to the ".py script not found" error:
cd /opt/ros/fuerte/stacks/camera_pose/camera_pose_calibration/src/camera_pose_calibration
sudo mv robomeasurement_cache.py robot_measurement_cache.py robot_measurement_cache.py.org
sudo cp /opt/ros/fuerte/stacks/calibration/calibration_launch/src/capture_executive/robot_measurement_cache.py .
By the way, I'm still not able to have something published to /tf.
EDIT: I'll describe the workflow and the final problem of camera_pose_calibration.
launch file for cameras
<launch>
<group ns="baseline12">
<node name="stereo_image_proc_bsl12" pkg="stereo_image_proc" type="stereo_image_proc"></node>
<node name="uvc_camera_bsl12" pkg="uvc_camera" type="stereo_node">
<param name="left/device" value="/dev/video1" />
<param name="right/device" value="/dev/video2" />
<param name="fps" value="15" />
<param name="skip_frames" value="1" />
<param name="width" value="640" />
<param name="height" value="480" />
<param name="frame_id" value="baseline12" />
</node>
<include file="$(find camera_pose_calibration)/blocks/calibration_tf_publisher.launch">
<arg name="cache_file" value="/tmp/camera_pose_calibration_cache.bag" />
</include>
</group>
</launch>
command line for camera_pose_calibration
roslaunch camera_pose_calibration calibrate_2_camera.launch camera1_ns:=/baseline12/left camera2_ns:=/baseline12/right checker_rows:=6 checker_cols:=8 checker_size:=0.028
Then I can see the /aggregated_image and the checkerboard corners are correctly identified. The problem is that I can't go on after this point.
You can see the screenshot:
rostopic list output
fabio@faramir:~$ rostopic list
/aggregated_image
/baseline12/camera_calibration
/baseline12/disparity
/baseline12/left/camera_info
/baseline12/left/cb_detector_config/cancel
/baseline12/left/cb_detector_config/feedback
/baseline12/left/cb_detector_config/goal
/baseline12/left/cb_detector_config/result
/baseline12/left/cb_detector_config/status
/baseline12/left/features
/baseline12/left/image_color
/baseline12/left/image_color/compressed
/baseline12/left/image_color/compressed/parameter_descriptions
/baseline12/left/image_color/compressed/parameter_updates
/baseline12/left/image_color/theora
/baseline12/left/image_color/theora/parameter_descriptions
/baseline12/left/image_color/theora/parameter_updates
/baseline12/left/image_mono
/baseline12/left/image_mono/compressed
/baseline12/left/image_mono/compressed/parameter_descriptions
/baseline12/left/image_mono/compressed/parameter_updates
/baseline12/left/image_mono/theora
/baseline12/left/image_mono/theora/parameter_descriptions
/baseline12/left/image_mono/theora/parameter_updates
/baseline12/left/image_raw
/baseline12/left/image_raw/compressed
/baseline12/left/image_raw/compressed/parameter_descriptions
/baseline12/left/image_raw/compressed/parameter_updates
/baseline12/left/image_raw/theora
/baseline12/left/image_raw/theora/parameter_descriptions
/baseline12/left/image_raw/theora/parameter_updates
/baseline12/left/image_rect
/baseline12/left/image_rect/compressed
/baseline12/left/image_rect/compressed/parameter_descriptions
/baseline12/left/image_rect/compressed/parameter_updates
/baseline12/left/image_rect/theora
/baseline12/left/image_rect/theora/parameter_descriptions
/baseline12/left/image_rect/theora/parameter_updates
/baseline12/left/image_rect_color
/baseline12/left/image_rect_color/compressed
/baseline12/left/image_rect_color/compressed/parameter_descriptions
/baseline12/left/image_rect_color/compressed/parameter_updates
/baseline12/left/image_rect_color/theora
/baseline12/left/image_rect_color/theora/parameter_descriptions
/baseline12/left/image_rect_color/theora/parameter_updates
/baseline12/left/image_throttle
/baseline12/left/monocam_settler_config/cancel
/baseline12/left/monocam_settler_config/feedback
/baseline12/left/monocam_settler_config/goal
/baseline12/left/monocam_settler_config/result
/baseline12/left/monocam_settler_config/status
/baseline12/left/settled_interval
/baseline12/points
/baseline12/points2
/baseline12/right/camera_info
/baseline12/right/cb_detector_config/cancel
/baseline12/right/cb_detector_config/feedback
/baseline12/right/cb_detector_config/goal
/baseline12/right/cb_detector_config/result
/baseline12/right/cb_detector_config/status
/baseline12/right/features
/baseline12/right/image_color
/baseline12/right/image_color/compressed
/baseline12/right/image_color/compressed/parameter_descriptions
/baseline12/right/image_color/compressed/parameter_updates
/baseline12/right/image_color/theora
/baseline12/right/image_color/theora/parameter_descriptions
/baseline12/right/image_color/theora/parameter_updates
/baseline12/right/image_mono
/baseline12/right/image_mono/compressed
/baseline12/right/image_mono/compressed/parameter_descriptions
/baseline12/right/image_mono/compressed/parameter_updates
/baseline12/right/image_mono/theora
/baseline12/right/image_mono/theora/parameter_descriptions
/baseline12/right/image_mono/theora/parameter_updates
/baseline12/right/image_raw
/baseline12/right/image_raw/compressed
/baseline12/right/image_raw/compressed/parameter_descriptions
/baseline12/right/image_raw/compressed/parameter_updates
/baseline12/right/image_raw/theora
/baseline12/right/image_raw/theora/parameter_descriptions
/baseline12/right/image_raw/theora/parameter_updates
/baseline12/right/image_rect
/baseline12/right/image_rect/compressed
/baseline12/right/image_rect/compressed/parameter_descriptions
/baseline12/right/image_rect/compressed/parameter_updates
/baseline12/right/image_rect/theora
/baseline12/right/image_rect/theora/parameter_descriptions
/baseline12/right/image_rect/theora/parameter_updates
/baseline12/right/image_rect_color
/baseline12/right/image_rect_color/compressed
/baseline12/right/image_rect_color/compressed/parameter_descriptions
/baseline12/right/image_rect_color/compressed/parameter_updates
/baseline12/right/image_rect_color/theora
/baseline12/right/image_rect_color/theora/parameter_descriptions
/baseline12/right/image_rect_color/theora/parameter_updates
/baseline12/right/image_throttle
/baseline12/right/monocam_settler_config/cancel
/baseline12/right/monocam_settler_config/feedback
/baseline12/right/monocam_settler_config/goal
/baseline12/right/monocam_settler_config/result
/baseline12/right/monocam_settler_config/status
/baseline12/right/settled_interval
/baseline12/stereo_image_proc_bsl12/parameter_descriptions
/baseline12/stereo_image_proc_bsl12/parameter_updates
/baseline12/stereo_image_proc_bsl12_debayer_left/parameter_descriptions
/baseline12/stereo_image_proc_bsl12_debayer_left/parameter_updates
/baseline12/stereo_image_proc_bsl12_debayer_right/parameter_descriptions
/baseline12/stereo_image_proc_bsl12_debayer_right/parameter_updates
/baseline12/stereo_image_proc_bsl12_rectify_color_left/parameter_descriptions
/baseline12/stereo_image_proc_bsl12_rectify_color_left/parameter_updates
/baseline12/stereo_image_proc_bsl12_rectify_color_right/parameter_descriptions
/baseline12/stereo_image_proc_bsl12_rectify_color_right/parameter_updates
/baseline12/stereo_image_proc_bsl12_rectify_mono_left/parameter_descriptions
/baseline12/stereo_image_proc_bsl12_rectify_mono_left/parameter_updates
/baseline12/stereo_image_proc_bsl12_rectify_mono_right/parameter_descriptions
/baseline12/stereo_image_proc_bsl12_rectify_mono_right/parameter_updates
/baseline12/tf2_buffer_server/cancel
/baseline12/tf2_buffer_server/feedback
/baseline12/tf2_buffer_server/goal
/baseline12/tf2_buffer_server/result
/baseline12/tf2_buffer_server/status
/camera_calibration
/clock
/intersected_interval
/interval
/interval_filtered
/interval_intersection_config/cancel
/interval_intersection_config/feedback
/interval_intersection_config/goal
/interval_intersection_config/result
/interval_intersection_config/status
/reset
/robot_measurement
/rosout
/rosout_agg
/tf
/tf_static
Any ideas? Why camera_pose_calibration can't detect the ckeckerboard and go on publishing data to tf?
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
