
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
I have uploaded (but not yet fully documented) our editor for easily creating NIST standard test arena scenarios (for example used for in the RoboCup Rescue competition) and assorted packages here. You can check it out (currently only works for electric, fuerte branch will be updated later) and try
roslaunch hector_nist_arena_worlds go2011_arena.launch
This should spawn a gazebo version of the RoboCup German Open 2011 arena. It has multiple roll/pitch ramps and is used at Team Hector to simulate our wheeled UGVs inside the arena.
Looks like this:
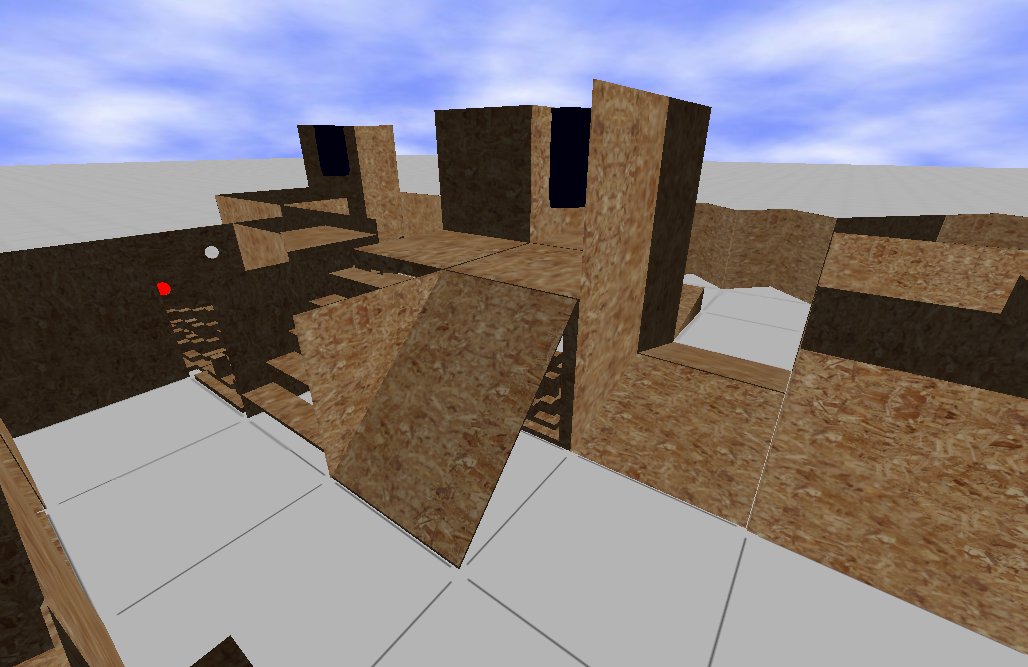
With the hector_nist_arena_designer you can even build other scenarios out of the available building blocks (walls, ramps, etc.) or define new building blocks (click on "help" in the editor for further info).
| | 2 | No.2 Revision |
I have uploaded (but not yet fully documented) our editor for easily creating NIST standard test arena scenarios (for example used for in the RoboCup Rescue competition) and assorted packages here. You can check it out (currently only works for electric, fuerte branch will be updated later) and try
roslaunch hector_nist_arena_worlds go2011_arena.launch
This should spawn a gazebo version of the RoboCup German Open 2011 arena. It has multiple roll/pitch ramps and is used at Team Hector to simulate our wheeled UGVs inside the arena.
Looks like this:
With the hector_nist_arena_designer you can even build other scenarios out of the available building blocks (walls, ramps, etc.) or define new building blocks (click on "help" in the editor for further info).
A hilly outdoor terrain is available in the hector_gazebo_worlds package and can be started using
roslaunch hector_gazebo_worlds rolling_landscape_120m.launch
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
