
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
I mapped with hector slam. Using odometry with it, I was able to create this map:
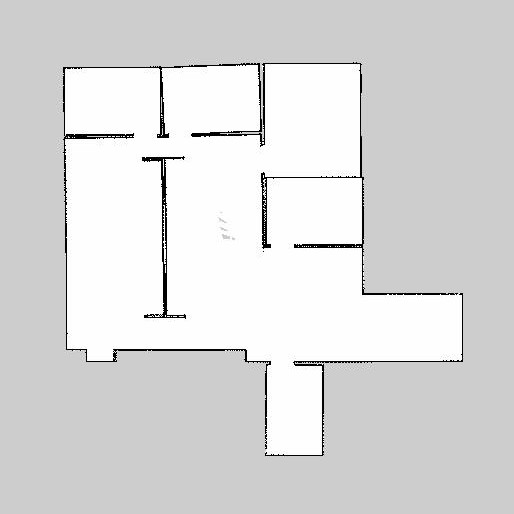
This is pretty close to the original. I don't have the ground truth image, so I cannot make any comparison locally, but, trusting my eyes, it seems to be a pretty good one. Playing with parameters in a launch file, you can probably improve it. Here is the launch file I used to create the above:
<?xml version="1.0"?>
<launch>
<node pkg="hector_mapping" type="hector_mapping" name="hector_mapping" output="screen">
<!-- Topic names -->
<param name="scan_topic" value="base_scan" />
<!-- Frame names -->
<param name="base_frame" value="base_laser_link" />
<param name="odom_frame" value="odom"/>
<param name="output_timing" value="false"/>
<!-- Tf use -->
<param name="use_tf_scan_transformation" value="true"/>
<param name="use_tf_pose_start_estimate" value="false"/>
<param name="pub_map_odom_transform" value="true"/>
<param name="advertise_map_service" value="true"/>
<!-- Map size / start point -->
<param name="map_resolution" value="0.050"/>
<param name="map_size" value="2048"/>
<param name="map_start_x" value="0.5"/>
<param name="map_start_y" value="0.5" />
<param name="map_multi_res_levels" value="2" />
<!-- Map update parameters -->
<param name="update_factor_free" value="0.4"/>
<param name="update_factor_occupied" value="0.9" />
<param name="map_update_distance_thresh" value="0.4"/>
<param name="map_update_angle_thresh" value="0.06" />
<!-- Debug parameters -->
<!--
<param name="pub_drawings" value="true"/>
<param name="pub_debug_output" value="true"/>
-->
</node>
<node pkg="hector_trajectory_server" type="hector_trajectory_server" name="hector_trajectory_server" output="screen">
<param name="target_frame_name" type="string" value="/map" />
<param name="source_frame_name" type="string" value="/base_link" />
<param name="trajectory_update_rate" type="double" value="4" />
<param name="trajectory_publish_rate" type="double" value="0.25" />
</node>
<node pkg="hector_geotiff" type="geotiff_node" name="hector_geotiff_node" output="screen" launch-prefix="nice -n 15">
<remap from="map" to="/dynamic_map" />
<param name="map_file_path" type="string" value="$(find hector_geotiff)/maps" />
<param name="map_file_base_name" type="string" value="hector_slam_map" />
<param name="geotiff_save_period" type="double" value="10" />
<param name="draw_background_checkerboard" type="bool" value="true" />
<param name="draw_free_space_grid" type="bool" value="true" />
</node>
</launch>
| | 2 | No.2 Revision |
I mapped with hector slam. Using odometry with it, I was able to create this map:
This is pretty close to the original. I don't have the ground truth image, so I cannot make any comparison locally, but, trusting my eyes, it seems to be a pretty good one. Playing with parameters in a launch file, you can probably improve it. Here is the launch file I used to create the above:
<?xml version="1.0"?>
<launch>
<node pkg="hector_mapping" type="hector_mapping" name="hector_mapping" output="screen">
<!-- Topic names -->
<param name="scan_topic" value="base_scan" />
<!-- Frame names -->
<param name="base_frame" value="base_laser_link" />
<param name="odom_frame" value="odom"/>
<param name="output_timing" value="false"/>
<!-- Tf use -->
<param name="use_tf_scan_transformation" value="true"/>
<param name="use_tf_pose_start_estimate" value="false"/>
<param name="pub_map_odom_transform" value="true"/>
<param name="advertise_map_service" value="true"/>
<!-- Map size / start point -->
<param name="map_resolution" value="0.050"/>
<param name="map_size" value="2048"/>
<param name="map_start_x" value="0.5"/>
<param name="map_start_y" value="0.5" />
<param name="map_multi_res_levels" value="2" />
<!-- Map update parameters -->
<param name="update_factor_free" value="0.4"/>
<param name="update_factor_occupied" value="0.9" />
<param name="map_update_distance_thresh" value="0.4"/>
<param name="map_update_angle_thresh" value="0.06" />
<!-- Debug parameters -->
<!--
<param name="pub_drawings" value="true"/>
<param name="pub_debug_output" value="true"/>
-->
</node>
<node pkg="hector_trajectory_server" type="hector_trajectory_server" name="hector_trajectory_server" output="screen">
<param name="target_frame_name" type="string" value="/map" />
<param name="source_frame_name" type="string" value="/base_link" />
<param name="trajectory_update_rate" type="double" value="4" />
<param name="trajectory_publish_rate" type="double" value="0.25" />
</node>
<node pkg="hector_geotiff" type="geotiff_node" name="hector_geotiff_node" output="screen" launch-prefix="nice -n 15">
<remap from="map" to="/dynamic_map" />
<param name="map_file_path" type="string" value="$(find hector_geotiff)/maps" />
<param name="map_file_base_name" type="string" value="hector_slam_map" />
<param name="geotiff_save_period" type="double" value="10" />
<param name="draw_background_checkerboard" type="bool" value="true" />
<param name="draw_free_space_grid" type="bool" value="true" />
</node>
</launch>
To run the bag in simtime, use this command:
rosbag play <bagfile>.bag --clock
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
