
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
The tutorial for ROS Noetic have not been updated to use manipulator with waffle. Last update was melodic. Having said that if you install from source using melodic instructions it should work.
$ cd ~/catkin_ws/src/
$ git clone https://github.com/ROBOTIS-GIT/turtlebot3_manipulation.git
$ git clone https://github.com/ROBOTIS-GIT/turtlebot3_manipulation_simulations.git
$ git clone https://github.com/ROBOTIS-GIT/open_manipulator_dependencies.git
$ sudo apt install ros-noetic-ros-control* && ros-noetic-control* && ros-noetic-moveit*
$ cd ~/catkin_ws && catkin_make
$ echo 'source ~/catkin_ws/devel/setup.bash' >> ~/.bashrc
$ source ~/.bashrc
And follow the rest of the tutorial:
To test:
$ export TURTLEBOT3_MODEL=waffle_pi
$ roslaunch turtlebot3_manipulation_gazebo turtlebot3_manipulation_gazebo.launch
| | 2 | No.2 Revision |
The tutorial for ROS Noetic have not been updated to use manipulator with waffle. Last update was melodic. Having said that if you install from source using melodic instructions it should work. Here is my suggested installation:
$ cd ~/catkin_ws/src/
$ git clone https://github.com/ROBOTIS-GIT/turtlebot3_manipulation.git
$ git clone https://github.com/ROBOTIS-GIT/turtlebot3_manipulation_simulations.git
$ git clone https://github.com/ROBOTIS-GIT/open_manipulator_dependencies.git
$ sudo apt install ros-noetic-ros-control* && ros-noetic-control* && ros-noetic-moveit*
$ cd ~/catkin_ws && catkin_make
$ echo 'source ~/catkin_ws/devel/setup.bash' >> ~/.bashrc
$ source ~/.bashrc
And follow the rest of the tutorial:
To test:
$ export TURTLEBOT3_MODEL=waffle_pi
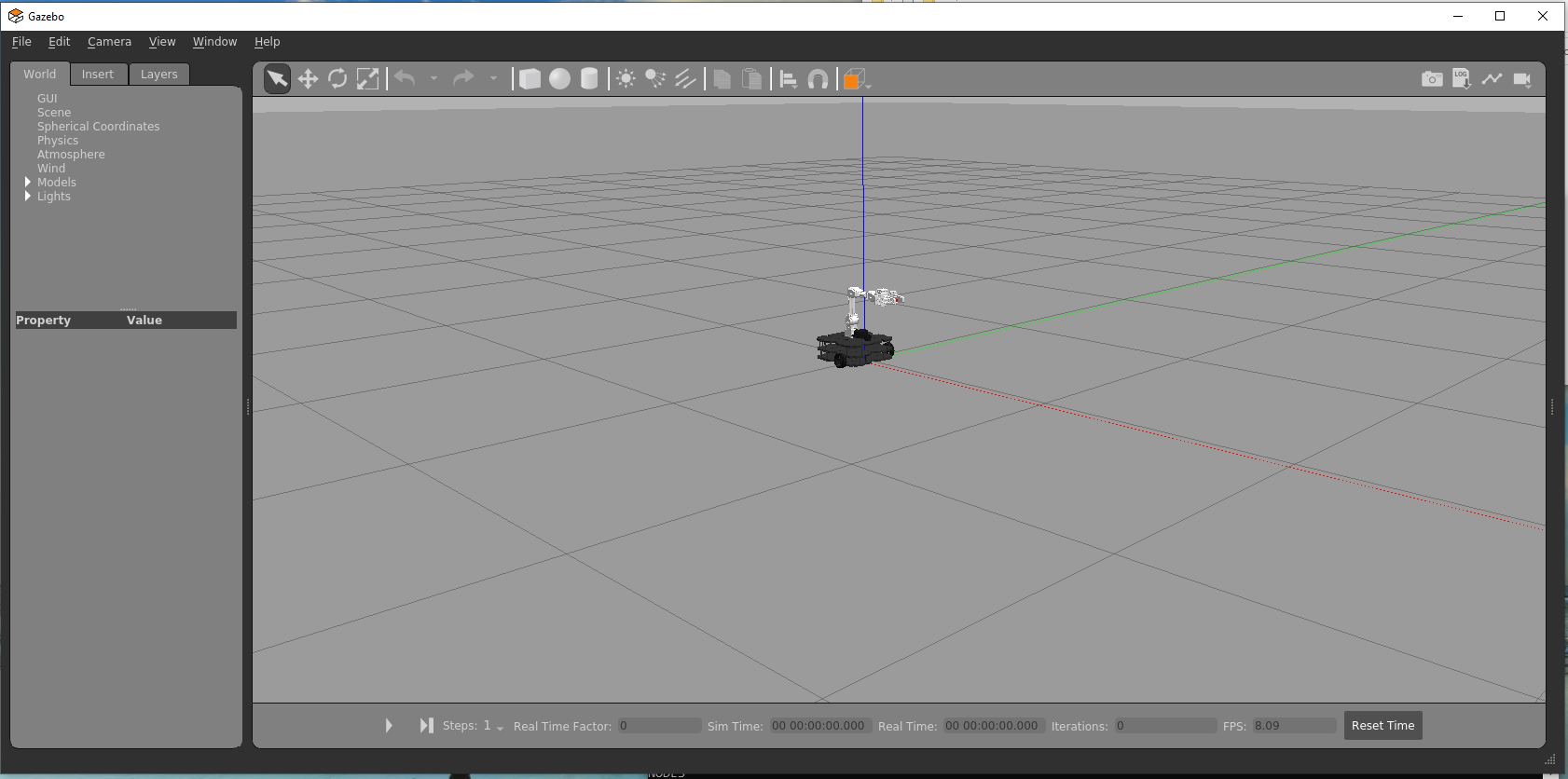
$ roslaunch turtlebot3_manipulation_gazebo turtlebot3_manipulation_gazebo.launch
It works :)
| | 3 | No.3 Revision |
The tutorial for ROS Noetic have has not been updated to use manipulator with waffle. Last update was melodic. Having said that if you install from source using melodic instructions it should work. Here is my suggested installation:
$ cd ~/catkin_ws/src/
$ git clone https://github.com/ROBOTIS-GIT/turtlebot3_manipulation.git
$ git clone https://github.com/ROBOTIS-GIT/turtlebot3_manipulation_simulations.git
$ git clone https://github.com/ROBOTIS-GIT/open_manipulator_dependencies.git
$ sudo apt install ros-noetic-ros-control* && ros-noetic-control* && ros-noetic-moveit*
$ cd ~/catkin_ws && catkin_make
$ echo 'source ~/catkin_ws/devel/setup.bash' >> ~/.bashrc
$ source ~/.bashrc
To test:
$ export TURTLEBOT3_MODEL=waffle_pi
$ roslaunch turtlebot3_manipulation_gazebo turtlebot3_manipulation_gazebo.launch
It works :)
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
