
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
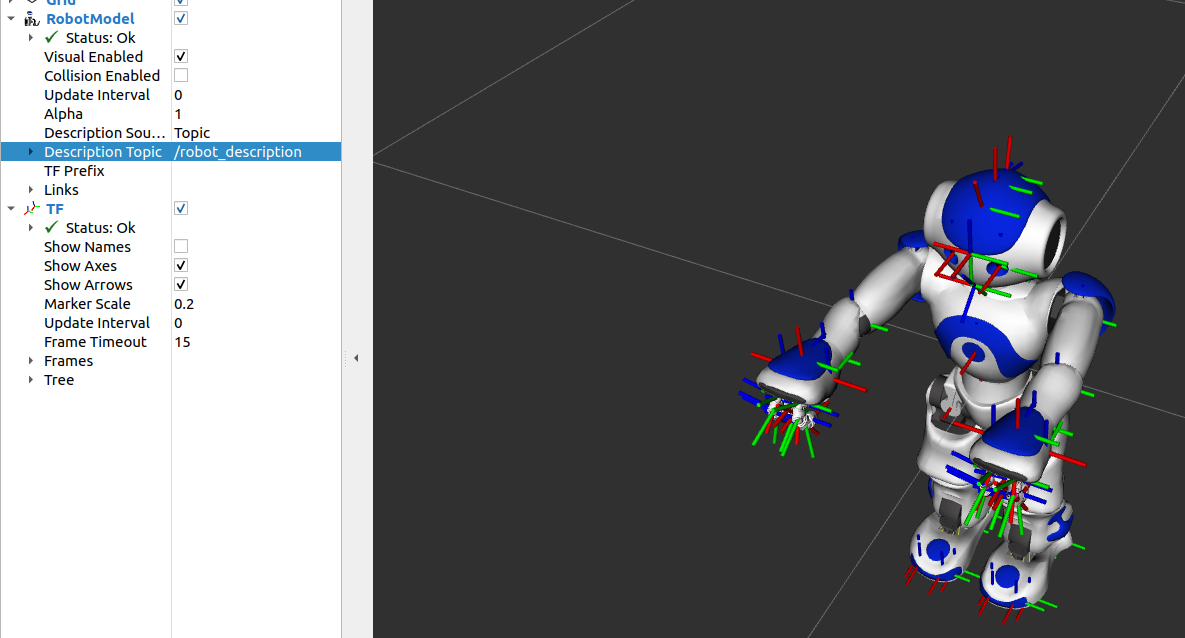
Assuming you're using the robot_state_publisher package to publish your TFs, it also publishes the contents of the URDF file of the robot you're using to a topic robot_description.
In RViz, in the Displays panel, open up RobotModel, and change Description Topic to /robot_description. (This makes the RobotModel visualization in RViz listen to the model of the robot from the robot_state_publisher).
Also, make sure Visual Enabled is ticked under Robot Model.
You should be able to see your own robot, like below (or whatever robot you're using)
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
