
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
I think the problem has something to do with the ray ground classifier node. This node is responsible for segregating the filtered point cloud (output of Point Cloud Filter node) into ground and non-ground objects. From the visualization video you referenced, it seems that in your case, the ray-ground classifier node is classifying the entire plane as non-ground. Hence, the euclidean cluster node (which is responsible for clustering and generating bounding boxes) is creating bounding boxes that cover your entire plane.
In order to fix this, I would recommend changing the parameters of the config file for the Ray Ground Classifier Node which can be found here: /opt/AutowareAuto/share/ray_ground_classifier_nodes/param
The config. (param) file used in the demo is called vlp16_sim_lexus_ray_ground.param.yaml
The content of the param file are as follows:
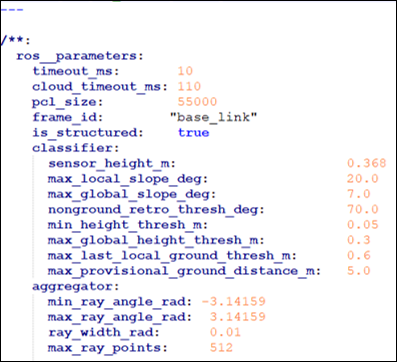
Here you would want to modify the sensor_height_m parameter to get the right results. One thing to keep in mind is that you might have to build the autoware.auto repository for the changes to take place.
Hope this resolves your isse!
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.