
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
For ROS to work completely in Vscode, without an external plugin.
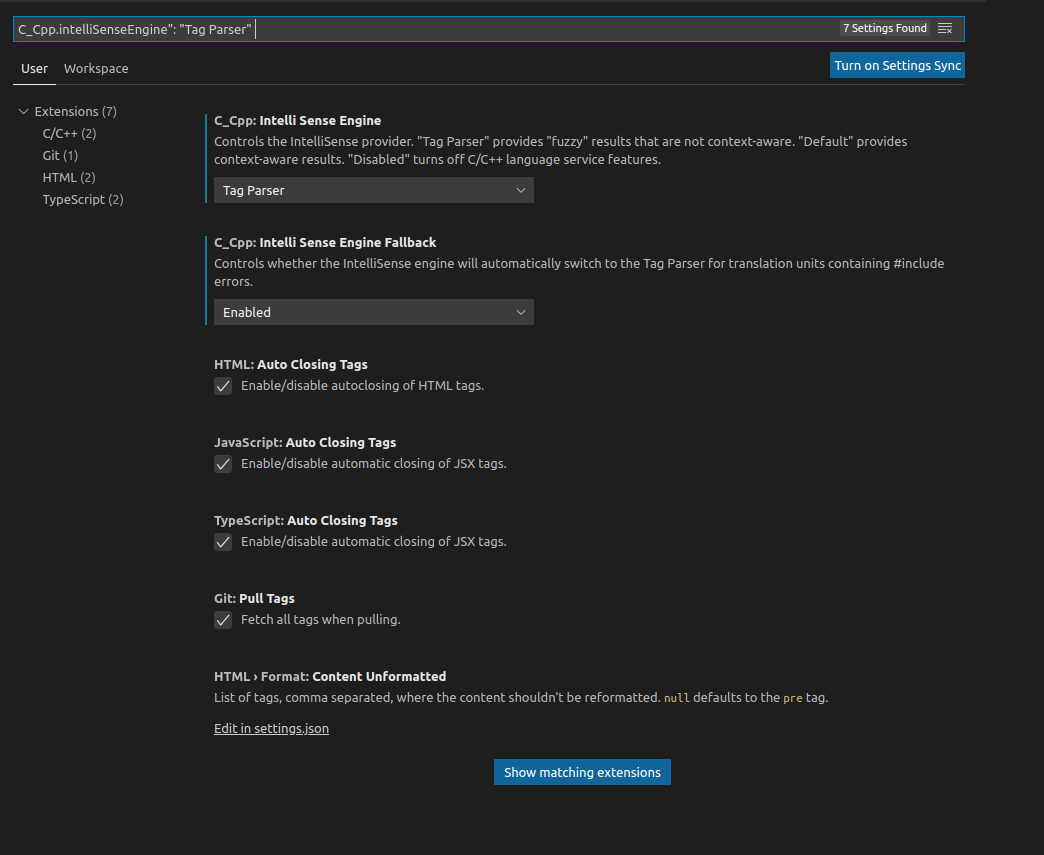
First. change "C_Cpp.intelliSenseEngine": "Tag Parser" for autocomplete:
in .vscode folder, make or change tasks.json for build, clean and prepare for debug.
{
// See https://go.microsoft.com/fwlink/?LinkId=733558
// for the documentation about the tasks.json format
"version": "2.0.0",
"tasks": [
{
"label": "prerun",
"type": "shell",
"dependsOn": [
"build package only"
],
"command": "source ../../devel/setup.bash && export ROS_MASTER_URI=http://localhost:11311/ "
},
{
"label": "build all packages",
"type": "shell",
"command": "cd ~/catkin_ws/ && catkin config --extend /opt/ros/noetic && catkin build -DCMAKE_BUILD_TYPE=Debug -j8",
"group": {
"kind": "build",
"isDefault": true
},
"problemMatcher": []
},
{
"label": "build package only",
"type": "shell",
"command": "cd ~/catkin_ws/ && catkin config --extend /opt/ros/noetic && catkin build ${workspaceFolderBasename} -DCMAKE_BUILD_TYPE=Debug -j8",
"group": {
"kind": "build",
"isDefault": true
},
"problemMatcher": []
},
{
"label": "clean",
"type": "shell",
"command": "cd ~/catkin_ws/ && catkin clean --yes"
},
{
"label": "release",
"type": "shell",
"command": "sudo checkinstall --install=no catkin build -j4 --cmake--args -DCMAKE_BUILD_TYPE=Release"
}
]
}
In the file c_cpp_properties.json add include files propriety
{
"configurations": [
{
"browse": {
"databaseFilename": "",
"limitSymbolsToIncludedHeaders": true
},
"name": "Linux",
"includePath": [
"${workspaceFolder}/**",
"/opt/ros/noetic/include/**",
"~/catkin_ws/devel/include/**"
],
"defines": [],
"compilerPath": "/usr/bin/gcc",
"cStandard": "gnu17",
"cppStandard": "gnu++14",
"intelliSenseMode": "gcc-x64"
}
],
"version": 4
}
For debug, make ou change launch.json
{
// Use IntelliSense to learn about possible attributes.
// Hover to view descriptions of existing attributes.
// For more information, visit: https://go.microsoft.com/fwlink/?linkid=830387
"version": "0.2.0",
"configurations": [
{
"name": "(gdb) launch",
"type": "cppdbg",
"request": "launch",
"program": "${env:HOME}/catkin_ws/devel/lib/${workspaceFolderBasename}/${fileBasenameNoExtension}",
"args": [],
"stopAtEntry": false,
"cwd": "${workspaceFolder}",
"environment": [],
"externalConsole": false,
"preLaunchTask": "prerun",
"MIMode": "gdb",
"targetArchitecture": "x64",
"avoidWindowsConsoleRedirection": true,
"setupCommands": [
{
"description": "Enable pretty-printing for gdb",
"text": "-enable-pretty-printing",
"ignoreFailures": true
}
]
}
]
}
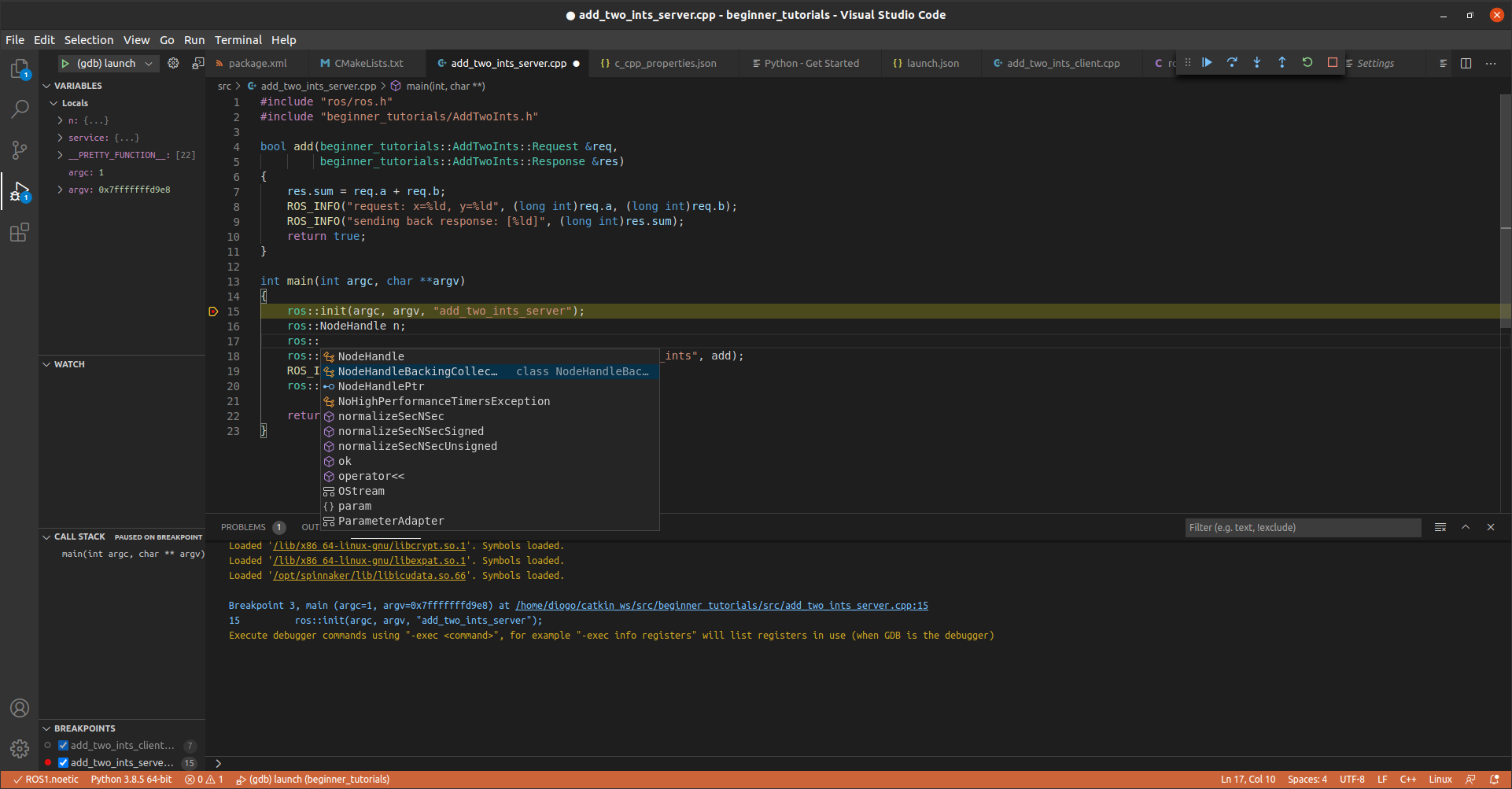
Final result:
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.