
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
AMCL doesn't replace odom, but corrects the global error that occurs when you keep integrating your encoder output. See the figure below. Odom stays the same, but AMCL adds an transform on top (/map to /odom) which corrects for the global localization error.
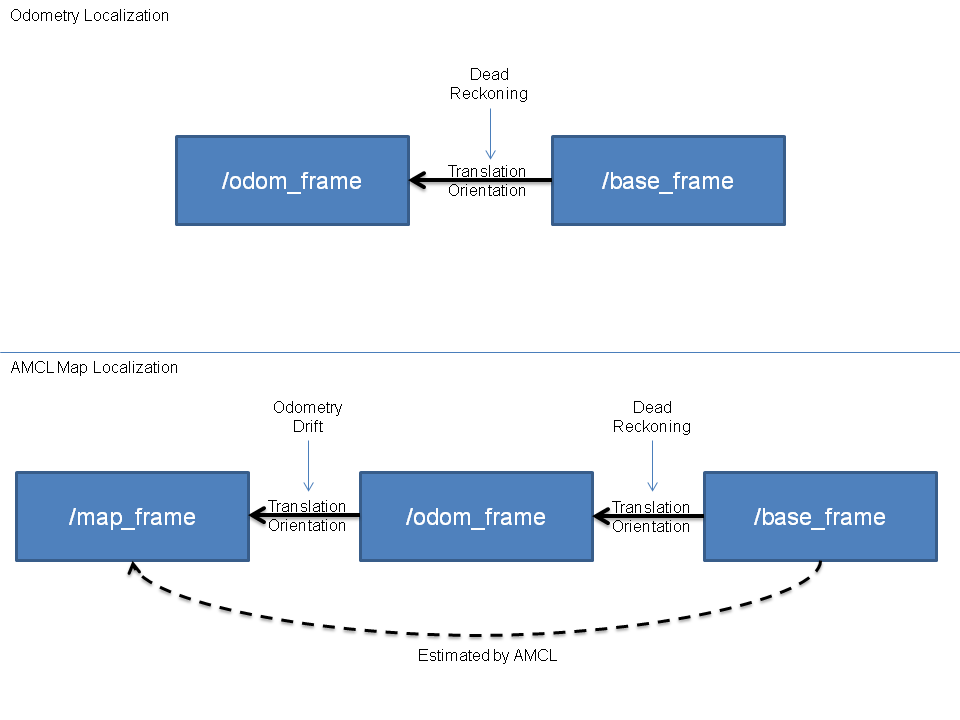
See also: http://wiki.ros.org/amcl
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.