
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
Well, Im launching the openni_launch to open a connection with the kinect and get this output:
[ INFO] [1339241377.238992262]: Number devices connected: 1
[ INFO] [1339241377.239220922]: 1. device on bus 002:06 is a Microsoft Kinect Camera (2bf) from Microsoft (45e) with serial id '0000000000000000'
[ INFO] [1339241377.240440489]: Searching for device with index = 1
[ INFO] [1339241377.309348551]: Opened 'Microsoft Kinect Camera' on bus 2:6 with serial number '0000000000000000'
[ INFO] [1339241377.337992905]: rgb_frame_id = '/camera_rgb_optical_frame'
[ INFO] [1339241377.338058556]: depth_frame_id = '/camera_depth_optical_frame'
[ WARN] [1339241377.343470563]: Camera calibration file /home/test/.ros/camera_info/rgb_0000000000000000.yaml not found.
[ WARN] [1339241377.343543128]: Using default parameters for RGB camera calibration.
[ WARN] [1339241377.343589572]: Camera calibration file /home/test/.ros/camera_info/depth_0000000000000000.yaml not found.
[ WARN] [1339241377.343626029]: Using default parameters for IR camera calibration.
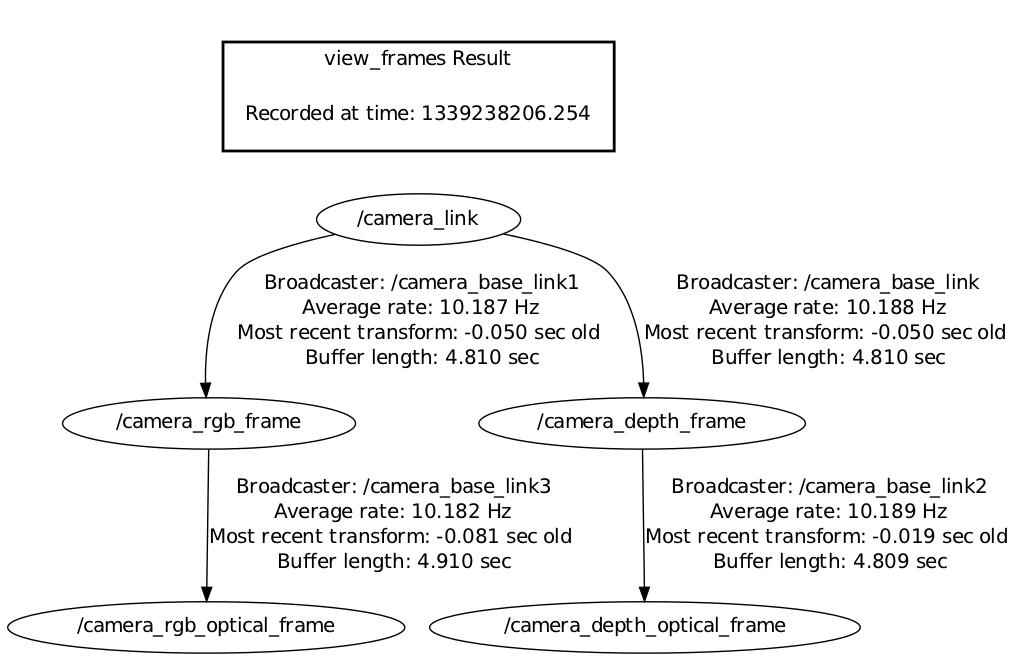
This are my frames:
And I changed in the source of openni_tracker.cpp this lines:
from:
string frame_id("openni_depth_frame");
pnh.getParam("camera_frame_id", frame_id);
to:
string frame_id("camera_depth_optical_frame");
pnh.getParam("camera_frame_id", frame_id);
Here is the output from rosnode and rosparam after running openni_tracker.
I get always the same error. What could this be?
test@user:~/ros_workspace$ rosrun openni_tracker openni_tracker
[ERROR] [1339241442.249295666]: Find user generator failed: This operation is invalid!
test@user:~/ros_workspace$ rosrun openni_tracker openni_tracker
[ERROR] [1339241445.211882042]: Find user generator failed: This operation is invalid!
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.