
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
I could get something that you don't expect from hector_mapping by setting "use_tf_scan_transformation" false. (Unless it keeps complaning.) I ran "mapping_default.launch" as you mentioned.
| | 2 | No.2 Revision |
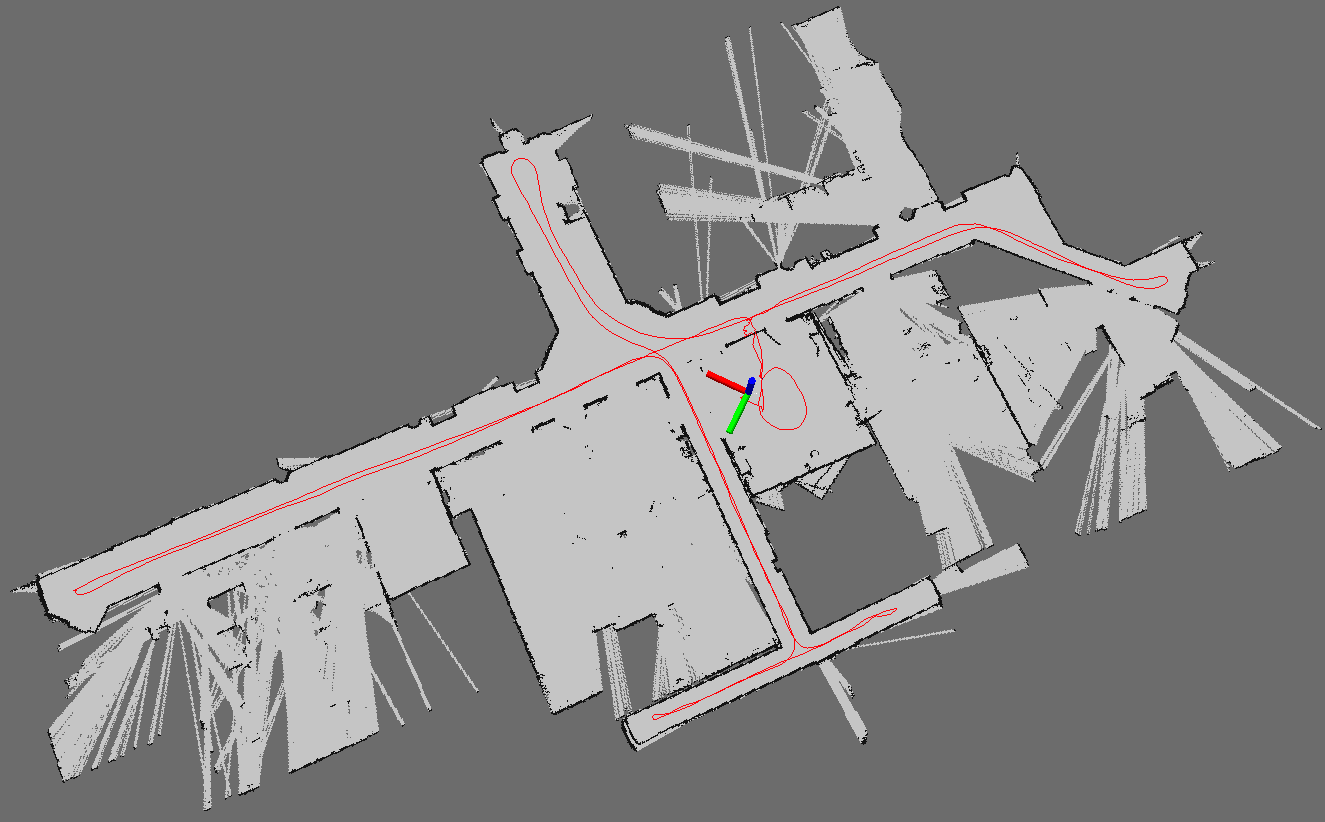
I could get something that map entire large area with hector_mapping. Thank you don't expect for launch file and the self enplaning tutorial.
I think it would be good to public if you could include this bag file and launch file to your repo then other ppl could have more idea from hector_mapping by setting "use_tf_scan_transformation" false. (Unless it keeps complaning.) it. All bag files are free to use with copyrights. In addition, this would be good comparison with laser_scan_matcher(scan_tool) and gmapping since they were failed this particular environment(two parallel walls.). I ran "mapping_default.launch" as you mentioned.also could generate demonstration footage for comparison.
Cheers,
Inkyu.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.