
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
An alternative to rospack depends is link text which visualizes the connections like so:
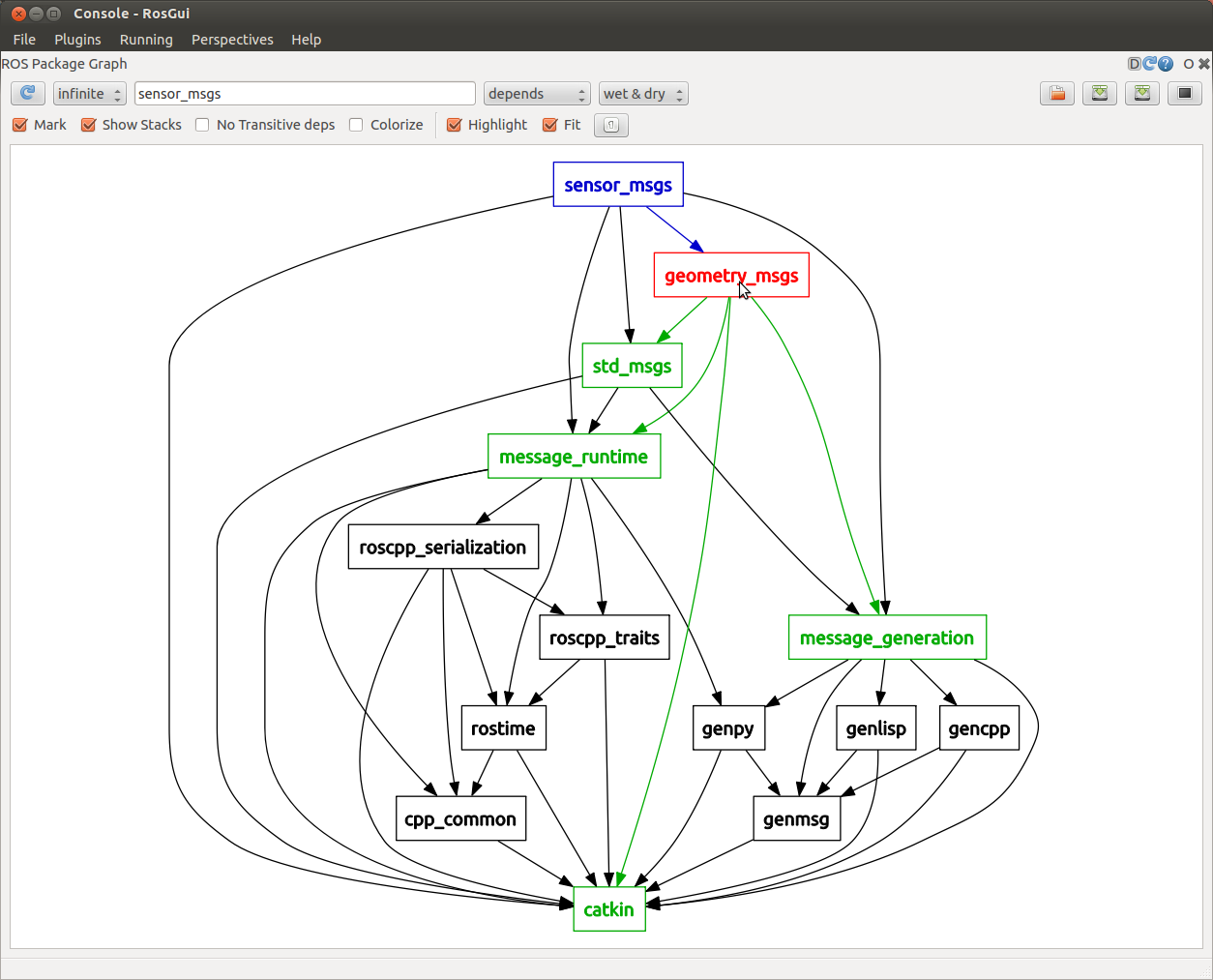
The documentation for rqt_dep seems to be non-existent, but thankfully it is a simple interface so you can figure out what most options do through trial-and-error.
| | 2 | No.2 Revision |
An alternative to rospack depends is link textrqt_dep which visualizes the connections like so:
The documentation for rqt_dep seems to be non-existent, but thankfully it is a simple interface so you can figure out what most options do through trial-and-error. trial-and-error.
| | 3 | No.3 Revision |
An alternative to rospack depends is rqt_dep which visualizes the connections like so:
The documentation for rqt_dep seems to be non-existent, but thankfully it is a simple interface so you can figure out what most options do through trial-and-error.
Tip: If you are using rqt_dep to show the dependencies for a package, make sure you source the workspace that contains that package first. Otherwise, when you type in your package name, nothing will show up.
| | 4 | No.4 Revision |
An alternative to rospack depends is rqt_dep which visualizes the connections like so:
The documentation for rqt_dep seems to be non-existent, but thankfully it is a simple interface so you can figure out what most options do through trial-and-error.
Tip: Tip: If you are using rqt_dep to show the dependencies for a package, make sure you source the workspace that contains that package first. Otherwise, when you type in your package name, nothing will show up.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
