
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
In Autoware coordinate system, base_link is defined at the center of rear wheels as follows.
https://drive.google.com/file/d/1HnGvuYTNLMmYjM4lnZncJlVcSlOSxQNa/view?usp=sharing
You need to set the relative transform between base_link to velodyne on Setup tab.
https://drive.google.com/file/d/1n3yp1Zcch18oD_PCy2RWQ28i2SYEMEt-/view?usp=sharing
// Sorry for link sharing, I have not enough karma yet.
| | 2 | No.2 Revision |
In Autoware coordinate system, base_link is defined at the center of rear wheels as follows.
https://drive.google.com/file/d/1HnGvuYTNLMmYjM4lnZncJlVcSlOSxQNa/view?usp=sharing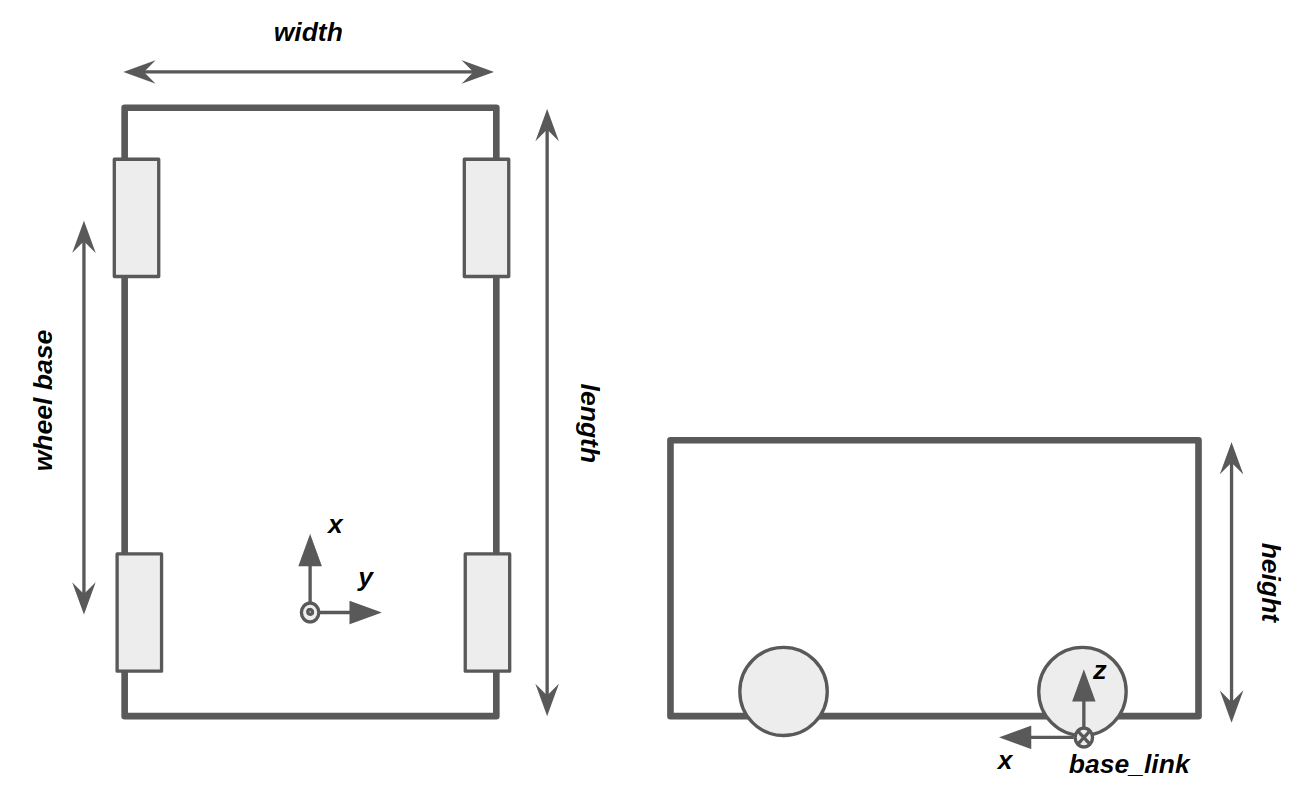
You need to set the relative transform between base_link to velodyne on Setup tab.
https://drive.google.com/file/d/1n3yp1Zcch18oD_PCy2RWQ28i2SYEMEt-/view?usp=sharing
// Sorry for link sharing, I have not enough karma yet.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.