
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
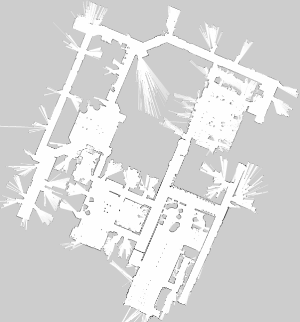
Map files in pgm format can be viewed just as any image editing in tools like GIMP. See for instance also this one here:
(Link taken from Q/A 37762)
The origin tag in the yaml states where the bottom left pixel of this image is located relative to the map's coordinate frame (supplied via the frame_id param in map_server, defaults to "map").
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
