
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
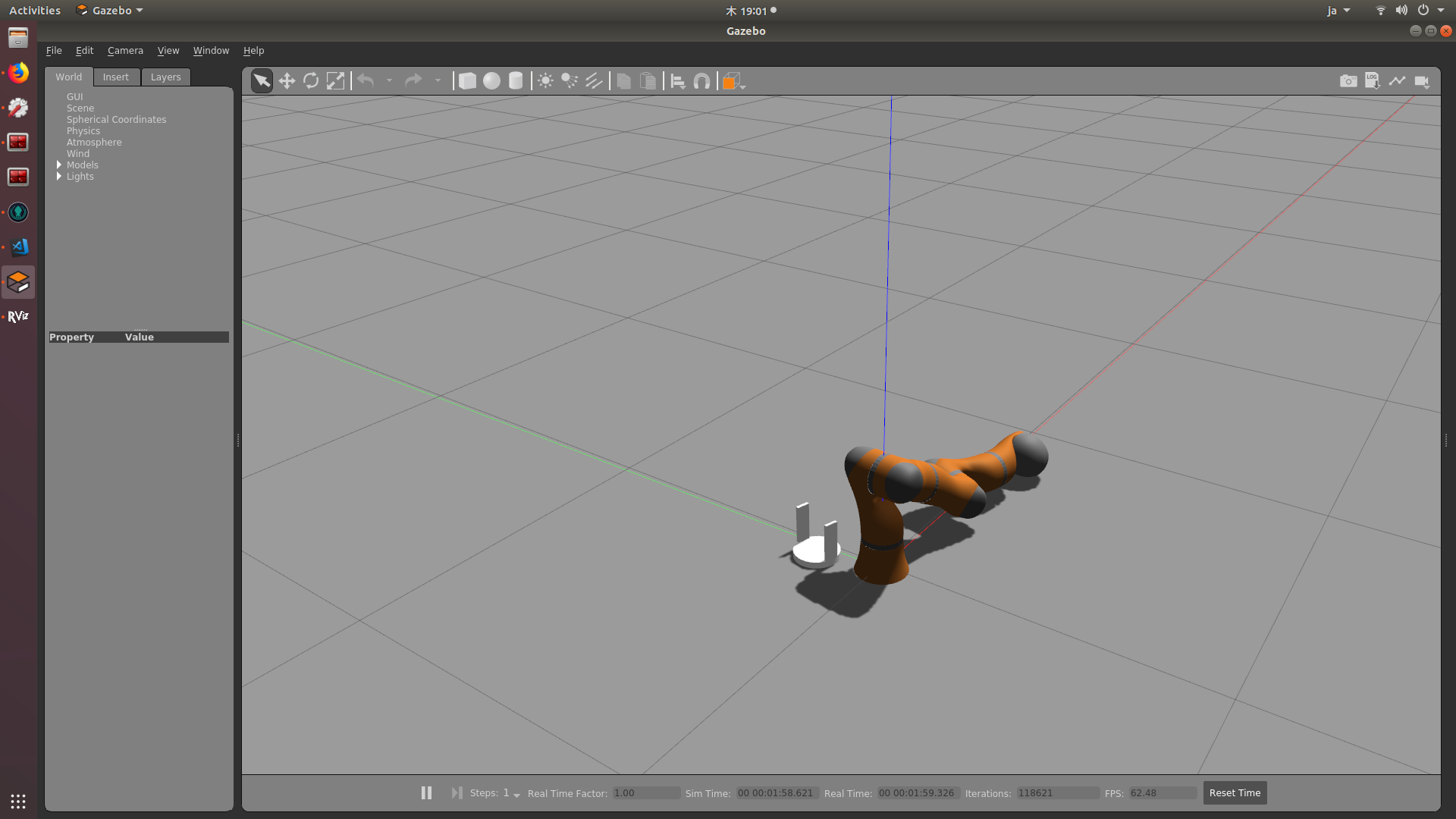
It looks like there are two robot_state_publisher nodes and controllers publishing in their own namespaces, but Rviz and Gazebo are not getting the data. When I start up your package, the robot (and gripper; essentially a second robot) are just limp on the floor in Gazebo. In Rviz, no joint states are received for the LWR. The gripper can be added as a second RobotModel in Rviz if the robot_description is set to /my_gripper/robot_description, but it also receives no joint states. This is because your controllers are publishing to /lwr/joint_states and /my_gripper/joint_states, but Rviz and Gazebo are listening to /joint_states.
I would try this: * Combine your URDF by attaching the gripper to the tip of your robot, as described in your other question. * Start up your gripper+LWR and their controllers in the same namespace as Gazebo and Rviz
It might be possible to remap both your namespaces to the global /joint_states, but I don't know how to do it. I couldn't find anything on this, except a related post, where someone came to the same conclusion about the single URDF file.
| | 2 | No.2 Revision |
It looks like there are two robot_state_publisher nodes and controllers publishing in their own namespaces, but Rviz and Gazebo are not getting the data. When I start up your package, the robot (and gripper; essentially a second robot) are just limp on the floor in Gazebo. In Rviz, no joint states are received for the LWR.
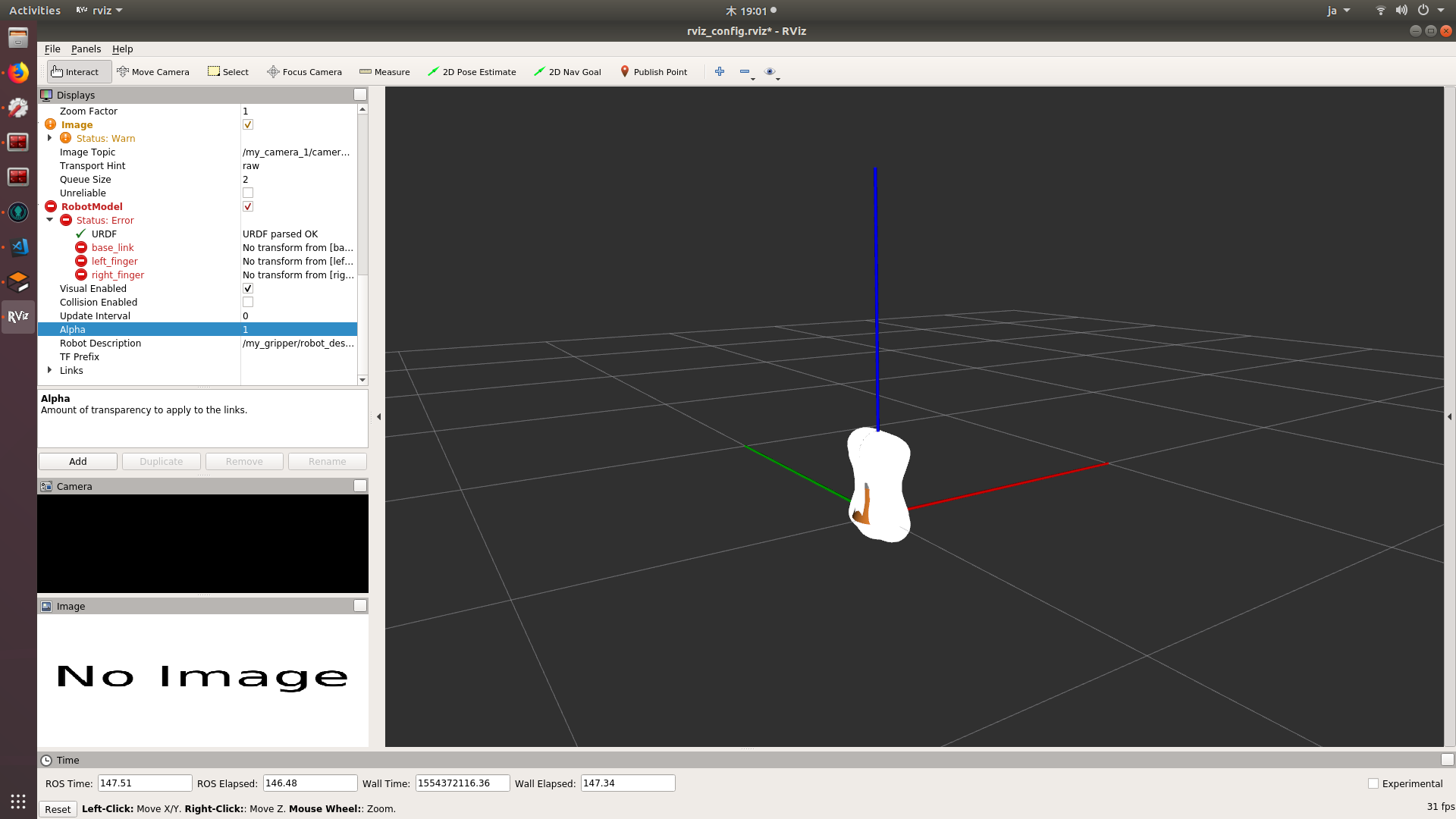
The gripper can be added as a second RobotModel in Rviz if the robot_description is set to /my_gripper/robot_description, but it also receives no joint states. This is because your controllers are publishing to /lwr/joint_states and /my_gripper/joint_states, but Rviz and Gazebo are listening to /joint_states.
I would try this: * Combine your URDF by attaching the gripper to the tip of your robot, as described in your other question. * Start up your gripper+LWR and their controllers in the same namespace as Gazebo and Rviz
It might be possible to remap both your namespaces to the global /joint_states, but I don't know how to do it. I couldn't find anything on this, except a related post, where someone came to the same conclusion about the single URDF file.
| | 3 | No.3 Revision |
It looks like there are two robot_state_publisher nodes and controllers publishing in their own namespaces, but Rviz and Gazebo are not getting the data. When I start up your package, the robot LWR (and gripper; essentially a second robot) are just limp on the floor in Gazebo. In Rviz, no joint states are received for the LWR.
The gripper can be added as a second RobotModel in Rviz if the robot_description is set to /my_gripper/robot_description, but it also receives no joint states. This is because your controllers are publishing to /lwr/joint_states and /my_gripper/joint_states, but Rviz and Gazebo are listening to /joint_states.
I would try this: * Combine your URDF by attaching the gripper to the tip of your robot, as described in your other question. * Start up your gripper+LWR and their controllers in the same namespace as Gazebo and Rviz
It might be possible to remap both your namespaces to the global /joint_states, but I don't know how to do it. I couldn't find anything on this, except a related post, where someone came to the same conclusion about the single URDF file.
| | 4 | No.4 Revision |
It looks like there are two robot_state_publisher nodes and controllers publishing in their own namespaces, but Rviz and Gazebo are not getting the data. When I start up your package, the LWR (and gripper; essentially a second robot) are just limp on the floor in Gazebo. In Rviz, no joint states are received for the LWR.
The gripper can be added as a second RobotModel in Rviz if the robot_description is set to /my_gripper/robot_description, but it also receives no joint states. This is because your controllers are publishing to /lwr/joint_states and /my_gripper/joint_states, but Rviz and Gazebo are listening to /joint_states.
I would try this:
* this:
It might be possible to remap both your namespaces to the global /joint_states, but I don't know how to do it. I couldn't find anything on this, except a related post, where someone came to the same conclusion about the single URDF file.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.