
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
I am on ROS Kinetic, but rtabmap is the same version than on Melodic and I cannot reproduce the problem. Following exactly what you did, after doing rosservice call /publish_map 1 1 0, I see in the rtabmap_ros terminal:
[ INFO] [1551304861.803715934]: rtabmap: Publishing map...
[ WARN] [1551304862.123340986]: Many occupancy grids should be loaded (~698), this may take a while to update the map(s)...
[ WARN] [1551304872.284061124]: Map(s) updated! (10.160718 s)
[ WARN] [1551304872.284428237]: /proj_map topic is deprecated! Subscribe to /grid_map topic instead.
so the map is created, then on map_server terminal, I can see:
$ rosrun map_server map_saver map:=proj_map
[ INFO] [1551304856.764290592]: Waiting for the map
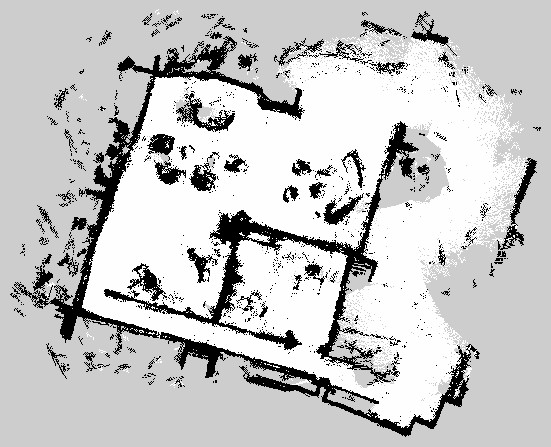
[ INFO] [1551304872.285442346]: Received a 551 X 447 map @ 0.050 m/pix
[ INFO] [1551304872.285460183]: Writing map occupancy data to map.pgm
[ INFO] [1551304872.289321822]: Writing map occupancy data to map.yaml
[ INFO] [1551304872.289390615]: Done
The map created:
The warnings that it did not receive any data since 5 seconds are normal, as no sensors are publishing topics to rtabmap.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
