
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
Actually, considering the error nature: error: invalid initialization of non-const reference of type ‘bool&’ from an rvalue of type ‘bool’, the figure below illustrates that:
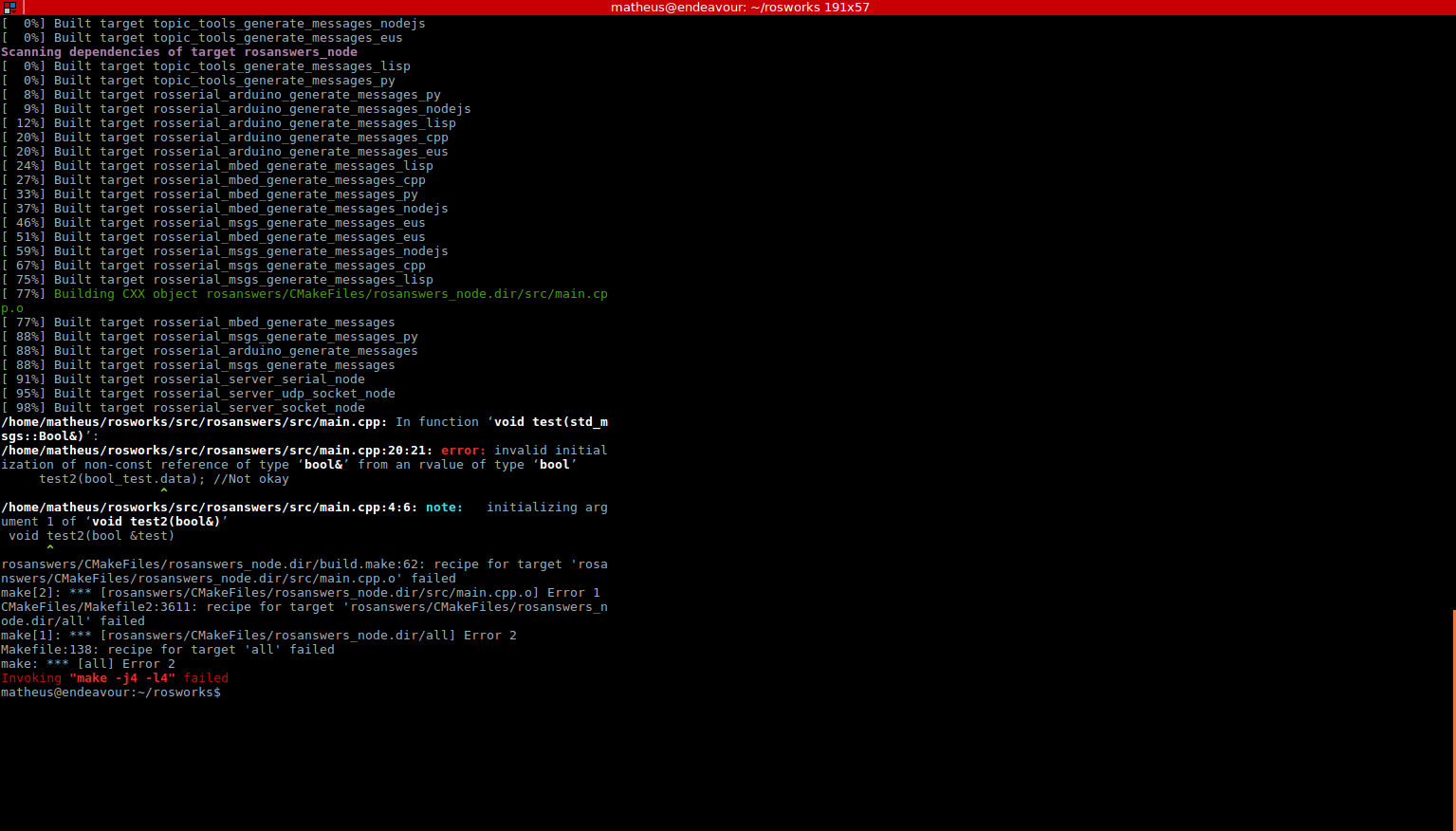
The correct way to solve this bug is passing this rvalue (bool_test.data) by const to reference, once the compiler denies the reference passing of an rvalue (temporary and literal types) without being const because it does not create a non-const reference to rvalues preventing operations like "3 = 5" and other stuff. The right way to do that is:
#include <ros/ros.h>
#include <std_msgs/Bool.h>
#include <stdint.h>
void test2(const uint8_t &test)
{
return;
}
void test(const std_msgs::Bool &bool_test)
{
test2(bool_test.data); //Not okay before, But OKAY now hahahaha
return;
}
int main(int argc, char** argv)
{
std_msgs::Bool bool_obj;
test(bool_obj);
return 0;
}
Moreover, remember, always try to use pass by const-to-reference, once errors like that are avoided and, consequently, you avoid other variables values changing and helps the compiler to optimize the code execution.
I hope to help you! If you have some question do not hesitate to ask me.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
