
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
You just need to select the 'base_link' frame as the world frame in RVIZ. The error your getting is because you're trying to view the world in the map frame, but nothing is defined in the map frame.
| | 2 | No.2 Revision |
You just need to select the 'base_link' frame as the world fixed frame in RVIZ. The error your getting is because you're trying to view the world in the map frame, but nothing is defined in the map frame.
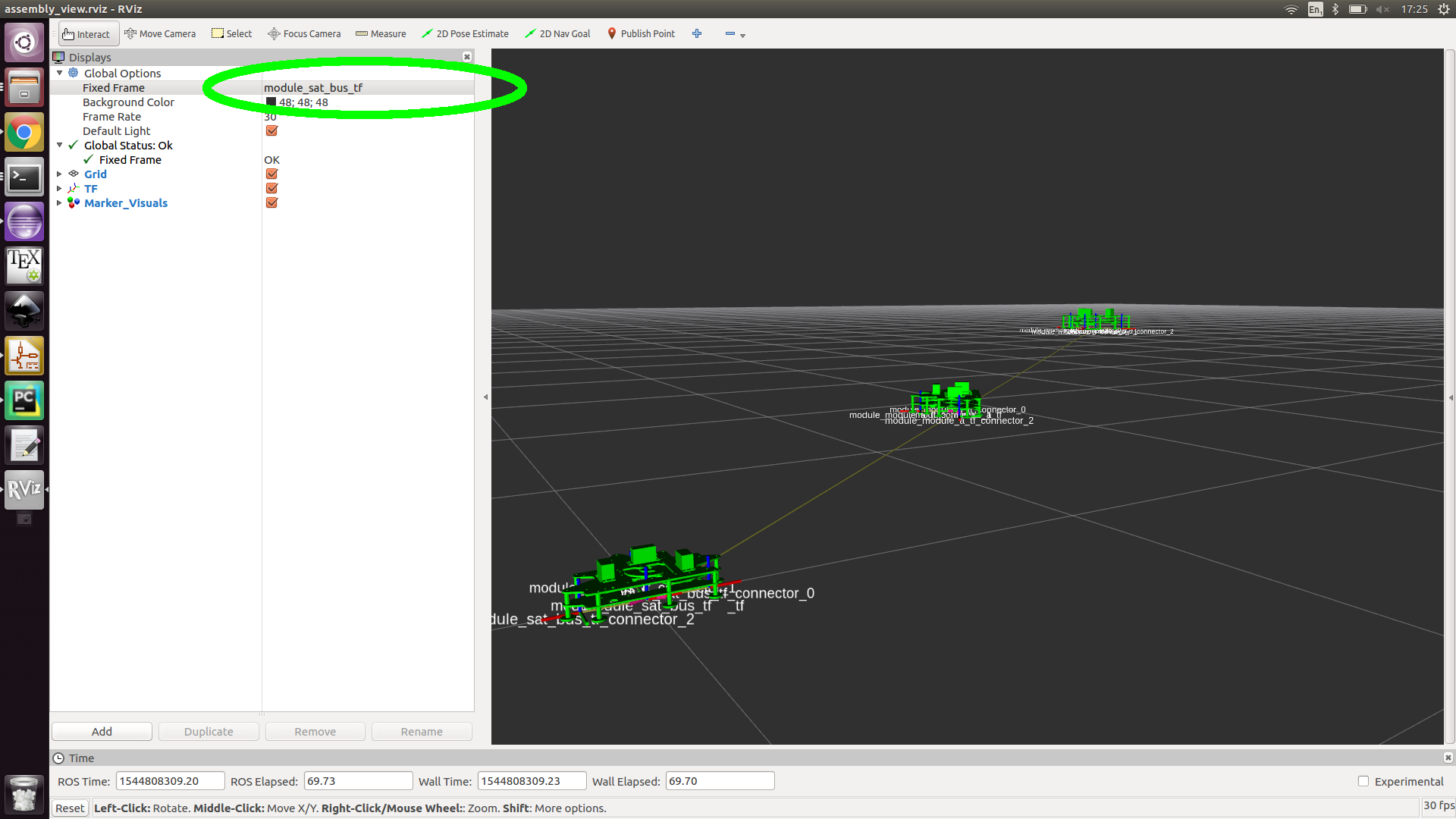
You can change this by clicking on the fixed frame drop down under global options, this is highlighted in the image below. You should be able to select from any of the link frames in your urdf.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
