
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
Install the stack. instructions are available at http://ros.org/wiki/topological_navigation
$roscd topological_roadmap/launch
$rosrun rviz rviz
Add following configuration file :
Background\ ColorR=0
Background\ ColorG=0
Background\ ColorB=0
Fixed\ Frame=/map
Target\ Frame=/odom
Grid.Alpha=0.5
Grid.Cell\ Size=1
Grid.ColorR=0.5
Grid.ColorG=0.5
Grid.ColorB=0.5
Grid.Enabled=1
Grid.Line\ Style=0
Grid.Line\ Width=0.03
Grid.Normal\ Cell\ Count=0
Grid.OffsetX=0
Grid.OffsetY=0
Grid.OffsetZ=0
Grid.Plane=0
Grid.Plane\ Cell\ Count=1000
Grid.Reference\ Frame=<Fixed Frame>
Inflated\ Obstacles.Alpha=1
Inflated\ Obstacles.ColorR=0
Inflated\ Obstacles.ColorG=0
Inflated\ Obstacles.ColorB=1
Inflated\ Obstacles.Enabled=0
Inflated\ Obstacles.Topic=/move_base_node/local_costmap/inflated_obstacles
Laser\ Scan.Alpha=1
Laser\ Scan.Billboard\ Size=0.051
Laser\ Scan.Color\ Transformer=Intensity
Laser\ Scan.Decay\ Time=0
Laser\ Scan.Enabled=1
Laser\ Scan.Position\ Transformer=XYZ
Laser\ Scan.Selectable=1
Laser\ Scan.Style=1
Laser\ Scan.Topic=/base_scan
Laser\ Scan..AxisAutocompute\ Value\ Bounds=1
Laser\ Scan..AxisAxis=2
Laser\ Scan..AxisMax\ Value=10
Laser\ Scan..AxisMin\ Value=-10
Laser\ Scan..AxisUse\ Fixed\ Frame=1
Laser\ Scan..Flat\ ColorColorR=1
Laser\ Scan..Flat\ ColorColorG=1
Laser\ Scan..Flat\ ColorColorB=1
Laser\ Scan..IntensityAutocompute\ Intensity\ Bounds=1
Laser\ Scan..IntensityMax\ ColorR=0.964706
Laser\ Scan..IntensityMax\ ColorG=0.964706
Laser\ Scan..IntensityMax\ ColorB=0.0784314
Laser\ Scan..IntensityMax\ Intensity=0
Laser\ Scan..IntensityMin\ ColorR=0
Laser\ Scan..IntensityMin\ ColorG=0
Laser\ Scan..IntensityMin\ ColorB=0
Laser\ Scan..IntensityMin\ Intensity=0
Local\ GRid.Alpha=0.7
Local\ GRid.Draw\ Behind=0
Local\ GRid.Enabled=0
Local\ GRid.Topic=/local_grid
Map.Alpha=0.7
Map.Draw\ Behind=0
Map.Enabled=1
Map.Topic=/map
Obstcal\ grid\ cells.Alpha=1
Obstcal\ grid\ cells.ColorR=1
Obstcal\ grid\ cells.ColorG=0.109804
Obstcal\ grid\ cells.ColorB=0
Obstcal\ grid\ cells.Enabled=1
Obstcal\ grid\ cells.Topic=/move_base_node/local_costmap/obstacles
Path.Alpha=1
Path.ColorR=0.1
Path.ColorG=1
Path.ColorB=0
Path.Enabled=1
Path.Topic=/move_base_node/NavfnROS/plan
Path2.Alpha=1
Path2.ColorR=1
Path2.ColorG=0
Path2.ColorB=0.0431373
Path2.Enabled=1
Path2.Topic=/move_base_node/TrajectoryPlannerROS/local_plan
Robot\ Footprint.Alpha=1
Robot\ Footprint.ColorR=1
Robot\ Footprint.ColorG=0
Robot\ Footprint.ColorB=0
Robot\ Footprint.Enabled=1
Robot\ Footprint.Topic=/move_base_node/local_costmap/robot_footprint
TF.All\ Enabled=1
TF.Enabled=0
TF.Frame\ Timeout=15
TF.Show\ Arrows=1
TF.Show\ Axes=1
TF.Show\ Names=1
TF.Update\ Interval=0
Topological\ Markers.Enabled=1
Topological\ Markers.Marker\ Topic=visualization_marker
Topological\ Markers.constraint_graph=1
Topological\ Markers.graph_localization=1
Topological\ Markers.roadmap=1
Topological\ Markers.topological_map=0
Topological\ Markers.topological_map_edges=0
Tool\ 2D\ Nav\ GoalTopic=/move_base_simple/goal
Tool\ 2D\ Pose\ EstimateTopic=initialpose
Camera\ Type=rviz::OrbitViewController
Camera\ Config=0.131 0.577591 52.0679 3.32693 0.219778 -13.9919
Property\ Grid\ State=selection=Path2.Enabled.Path2.Color;expanded=.Global Options,TF.Enabled.TF.Tree,Topological Markers.Enabled,Topological Markers.Enabled.Topological Markers.Namespaces,Path.Enabled,Path2.Enabled;scrollpos=0,0;splitterpos=196,378;ispageselected=1
[Display0]
Name=Map
Package=rviz
ClassName=rviz::MapDisplay
[Display1]
Name=Robot Footprint
Package=rviz
ClassName=rviz::PolygonDisplay
[Display2]
Name=Inflated Obstacles
Package=rviz
ClassName=rviz::GridCellsDisplay
[Display3]
Name=Laser Scan
Package=rviz
ClassName=rviz::LaserScanDisplay
[Display4]
Name=Grid
Package=rviz
ClassName=rviz::GridDisplay
[Display5]
Name=TF
Package=rviz
ClassName=rviz::TFDisplay
[Display6]
Name=Topological Markers
Package=rviz
ClassName=rviz::MarkerDisplay
[Display7]
Name=Obstcal grid cells
Package=rviz
ClassName=rviz::GridCellsDisplay
[Display8]
Name=Local GRid
Package=rviz
ClassName=rviz::MapDisplay
[Display9]
Name=Path
Package=rviz
ClassName=rviz::PathDisplay
[Display10]
Name=Path2
Package=rviz
ClassName=rviz::PathDisplay
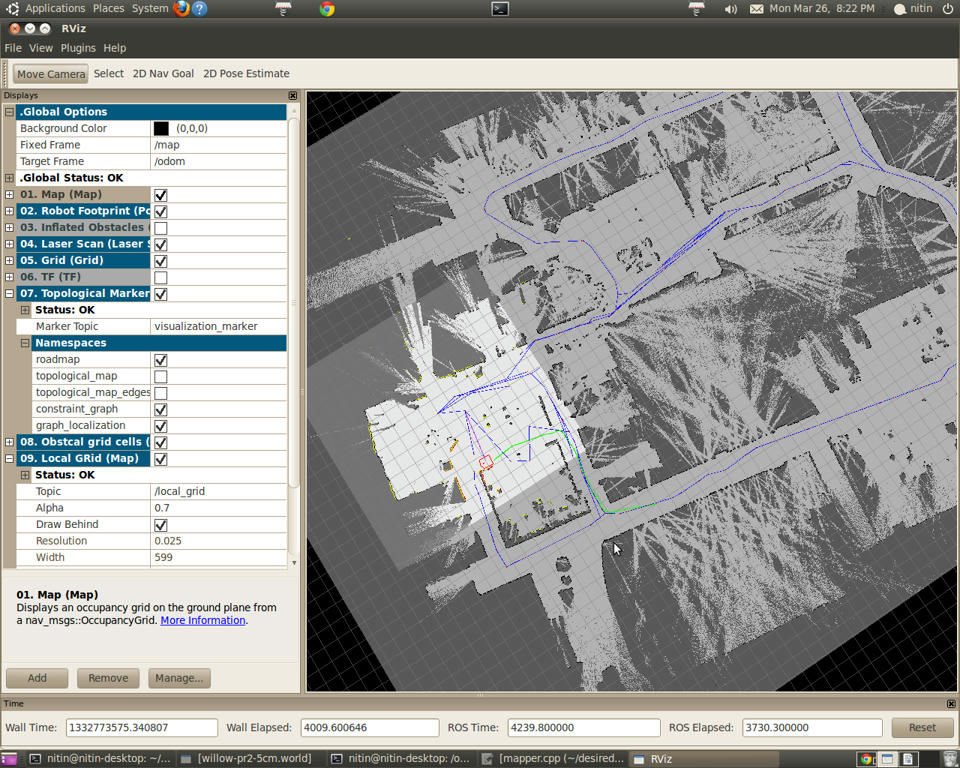
This will enable visualization of algorithm output for example roadmap, topological_map, constraint_graph, graph_localization etc.
$ rosrun erratic_teleop erratic_keyboard_teleop You can teleoperate the robot and see the map development.
It is also possible to pass the goal using rviz. It plans and follow the path (currently in my setup, only in local occupancy grid). I had some errors in TF.
[ERROR] [1332770625.887798300, 1543.600000000]: TF Exception that should never happen for sensor frame: , cloud frame: base_laser_link, You requested a transform that is 0.300 seconds in the past,
but the tf buffer only has a history of 0.100 seconds.
When trying to transform between /base_laser_link and /grid67.
| | 2 | snapshots |
Install the stack. instructions are available at http://ros.org/wiki/topological_navigation
$roscd topological_roadmap/launch
$rosrun rviz rviz
Add following configuration file :
Background\ ColorR=0
Background\ ColorG=0
Background\ ColorB=0
Fixed\ Frame=/map
Target\ Frame=/odom
Grid.Alpha=0.5
Grid.Cell\ Size=1
Grid.ColorR=0.5
Grid.ColorG=0.5
Grid.ColorB=0.5
Grid.Enabled=1
Grid.Line\ Style=0
Grid.Line\ Width=0.03
Grid.Normal\ Cell\ Count=0
Grid.OffsetX=0
Grid.OffsetY=0
Grid.OffsetZ=0
Grid.Plane=0
Grid.Plane\ Cell\ Count=1000
Grid.Reference\ Frame=<Fixed Frame>
Inflated\ Obstacles.Alpha=1
Inflated\ Obstacles.ColorR=0
Inflated\ Obstacles.ColorG=0
Inflated\ Obstacles.ColorB=1
Inflated\ Obstacles.Enabled=0
Inflated\ Obstacles.Topic=/move_base_node/local_costmap/inflated_obstacles
Laser\ Scan.Alpha=1
Laser\ Scan.Billboard\ Size=0.051
Laser\ Scan.Color\ Transformer=Intensity
Laser\ Scan.Decay\ Time=0
Laser\ Scan.Enabled=1
Laser\ Scan.Position\ Transformer=XYZ
Laser\ Scan.Selectable=1
Laser\ Scan.Style=1
Laser\ Scan.Topic=/base_scan
Laser\ Scan..AxisAutocompute\ Value\ Bounds=1
Laser\ Scan..AxisAxis=2
Laser\ Scan..AxisMax\ Value=10
Laser\ Scan..AxisMin\ Value=-10
Laser\ Scan..AxisUse\ Fixed\ Frame=1
Laser\ Scan..Flat\ ColorColorR=1
Laser\ Scan..Flat\ ColorColorG=1
Laser\ Scan..Flat\ ColorColorB=1
Laser\ Scan..IntensityAutocompute\ Intensity\ Bounds=1
Laser\ Scan..IntensityMax\ ColorR=0.964706
Laser\ Scan..IntensityMax\ ColorG=0.964706
Laser\ Scan..IntensityMax\ ColorB=0.0784314
Laser\ Scan..IntensityMax\ Intensity=0
Laser\ Scan..IntensityMin\ ColorR=0
Laser\ Scan..IntensityMin\ ColorG=0
Laser\ Scan..IntensityMin\ ColorB=0
Laser\ Scan..IntensityMin\ Intensity=0
Local\ GRid.Alpha=0.7
Local\ GRid.Draw\ Behind=0
Local\ GRid.Enabled=0
Local\ GRid.Topic=/local_grid
Map.Alpha=0.7
Map.Draw\ Behind=0
Map.Enabled=1
Map.Topic=/map
Obstcal\ grid\ cells.Alpha=1
Obstcal\ grid\ cells.ColorR=1
Obstcal\ grid\ cells.ColorG=0.109804
Obstcal\ grid\ cells.ColorB=0
Obstcal\ grid\ cells.Enabled=1
Obstcal\ grid\ cells.Topic=/move_base_node/local_costmap/obstacles
Path.Alpha=1
Path.ColorR=0.1
Path.ColorG=1
Path.ColorB=0
Path.Enabled=1
Path.Topic=/move_base_node/NavfnROS/plan
Path2.Alpha=1
Path2.ColorR=1
Path2.ColorG=0
Path2.ColorB=0.0431373
Path2.Enabled=1
Path2.Topic=/move_base_node/TrajectoryPlannerROS/local_plan
Robot\ Footprint.Alpha=1
Robot\ Footprint.ColorR=1
Robot\ Footprint.ColorG=0
Robot\ Footprint.ColorB=0
Robot\ Footprint.Enabled=1
Robot\ Footprint.Topic=/move_base_node/local_costmap/robot_footprint
TF.All\ Enabled=1
TF.Enabled=0
TF.Frame\ Timeout=15
TF.Show\ Arrows=1
TF.Show\ Axes=1
TF.Show\ Names=1
TF.Update\ Interval=0
Topological\ Markers.Enabled=1
Topological\ Markers.Marker\ Topic=visualization_marker
Topological\ Markers.constraint_graph=1
Topological\ Markers.graph_localization=1
Topological\ Markers.roadmap=1
Topological\ Markers.topological_map=0
Topological\ Markers.topological_map_edges=0
Tool\ 2D\ Nav\ GoalTopic=/move_base_simple/goal
Tool\ 2D\ Pose\ EstimateTopic=initialpose
Camera\ Type=rviz::OrbitViewController
Camera\ Config=0.131 0.577591 52.0679 3.32693 0.219778 -13.9919
Property\ Grid\ State=selection=Path2.Enabled.Path2.Color;expanded=.Global Options,TF.Enabled.TF.Tree,Topological Markers.Enabled,Topological Markers.Enabled.Topological Markers.Namespaces,Path.Enabled,Path2.Enabled;scrollpos=0,0;splitterpos=196,378;ispageselected=1
[Display0]
Name=Map
Package=rviz
ClassName=rviz::MapDisplay
[Display1]
Name=Robot Footprint
Package=rviz
ClassName=rviz::PolygonDisplay
[Display2]
Name=Inflated Obstacles
Package=rviz
ClassName=rviz::GridCellsDisplay
[Display3]
Name=Laser Scan
Package=rviz
ClassName=rviz::LaserScanDisplay
[Display4]
Name=Grid
Package=rviz
ClassName=rviz::GridDisplay
[Display5]
Name=TF
Package=rviz
ClassName=rviz::TFDisplay
[Display6]
Name=Topological Markers
Package=rviz
ClassName=rviz::MarkerDisplay
[Display7]
Name=Obstcal grid cells
Package=rviz
ClassName=rviz::GridCellsDisplay
[Display8]
Name=Local GRid
Package=rviz
ClassName=rviz::MapDisplay
[Display9]
Name=Path
Package=rviz
ClassName=rviz::PathDisplay
[Display10]
Name=Path2
Package=rviz
ClassName=rviz::PathDisplay
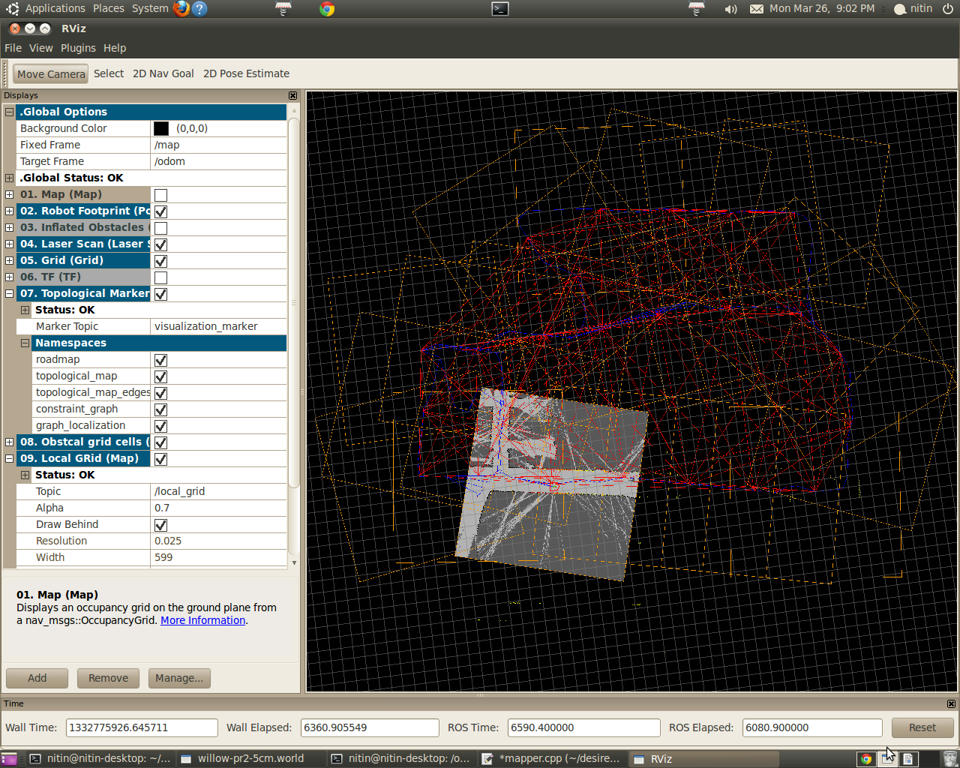
This will enable visualization of algorithm output for example roadmap, topological_map, constraint_graph, graph_localization etc.
$ rosrun erratic_teleop erratic_keyboard_teleop You can teleoperate the robot and see the map development.
It is also possible to pass the goal using rviz. It plans and follow the path (currently in my setup, only in local occupancy grid). I had some errors in TF.
[ERROR] [1332770625.887798300, 1543.600000000]: TF Exception that should never happen for sensor frame: , cloud frame: base_laser_link, You requested a transform that is 0.300 seconds in the past,
but the tf buffer only has a history of 0.100 seconds.
When trying to transform between /base_laser_link and /grid67.
I am able to create topological maps. The data is getting stored in package laser_slam in folder data.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
